Blind_Landing_Experimental_Unit
ブラインド着陸実験単位省略、BLEU、の単位だった英国政府の早期作成を担当autolandingの1960年代半ばまで、1940年代後半から、軍と民間航空機のためのシステムを。
コンテンツ
1 バックグラウンド
2 オートランドの起源
3 1950年代と1960年代のBLEU
3.1 BLEUシステム
4 遺産
5 ノート
6 参考文献
7 外部リンク
バックグラウンド
航空の初期のパイロットは、彼らが飛んでいる場所を見つけるために推測航法に頼っていました。それは夜や悪天候では困難または不可能であることがわかりました。 1925年の米国郵便局の調査によると、強制着陸の76%は天候によるものであり、ブラインド着陸を容易にするシステムの早期の必要性が浮き彫りになりました。この問題に対処するための初期の提案は、原始的な無線信号の使用から、主要高速道路の近くに緊急着陸帯を定期的に配置することまで多岐にわたりました。第二次世界大戦の経験は、問題へのより多くの注意を呼びました。英国に拠点を置く爆撃機は、早朝にホームベースに戻って、すべての着陸地点が完全に曇っていることを発見することがありました。その結果、機体と搭乗員が無意味に失われました。戦後、航空専門家は、あらゆる状況で軍事任務が可能になり、航空会社が空港の霧から離れるという無駄で費用のかかる慣行を回避できるため、軍用および民間用の両方のチラシにメリットがあることを知っていました。
戦前には、いくつかのブラインド着陸システムが開発されていました。特に、米国のダイアモンド-ダンモアシステムとドイツのロレンツビームの概念です。どちらも、当時の大型航空機で一般的だった航空機の音声ラジオにある程度依存していました。ダイアモンドダンモアは積極的な使用が見られなかったようですが、ローレンツシステムはドイツ、英国、その他のヨーロッパの主要空港とそれらに関連する海外の分野に導入されました。これらは一般に、300〜400 kHzのオーダーの一般的な中波周波数で動作しました。これらの周波数は、戦中期までには明らかに低周波数範囲でした。どのシステムの光学分解能もアンテナシステムの波長とサイズの組み合わせであるため、これらの周波数を使用すると精度が比較的低くなります。戦争中、100 MHz付近のVHF周波数で動作する同様のシステムで実験が行われ、そのようなさまざまなシステムが多くの軍用飛行場で使用されました。
オートランドの起源

DZ203、システムトライアルで使用される飛行機
BLEUを形成する前に、自動着陸は、TREの通信フライングユニット(TFU)で作製したRAF Deffordにボーイング247 D航空機、DZ203アメリカンSCS 51無線案内システムを使用して、初期の1945年、。着陸は完全な暗闇の中で行われ、着陸灯はなく、他のすべての照明は戦時中の停電によって隠されていました。フレアアウトはありませんでした。接近速度が遅く、滑空角度が浅いため、航空機は地面にまっすぐ飛ぶことができました。 SCS 51は、1948年にICAOによって採用された計器着陸装置(ILS)の基礎でした。
モーズリー大佐のSCS51に代わるシステムがあり、それはデフォードのF / O LCバーバーと彼の同僚によって完全に考案、開発、試行されたレーダーベースのシステムでした。このシステムは、自動操縦の方位情報に追加できる範囲と高さのデータを効果的に提供しました。
ロイヤルエアクラフトエスタブリッシュメント(RAE)のブラインドランディング実験ユニット(BLEU)は、1945年と1946年にRAFウッドブリッジとRAFマートルシャムヒースに設立されました。RAE、ファーンボロー、電気通信研究財団からスタッフを集めた学際的なユニットでした。、マルバーン(TRE)。委託条件は、ユニットが「RAEの衛星として動作し、RAF、海軍および民間航空機のブラインドアプローチおよび着陸の開発を担当する」というものでした。 BLEUでの最初の数年間の調査により、ブラインドランディングへの有望なアプローチは完全自動システムであるという結論が導き出され、後にオートランドと呼ばれるそのようなシステムの要件の定義が作成されました。
計器着陸装置(ILS)は、SCS 51のコンセプトに基づいて、戦後の時代に導入されました。これは、2つの別々の無線信号を使用しました。1つは横方向の誘導用の「ローカライザー」で、もう1つは垂直方向の誘導用の「グライドスロープ」です。彼らは両方とも同じ基本原則に取り組んだ。グライドスロープ周波数が常にローカライザーから一定量離れているように、各信号は固定された関係で別々の搬送周波数でブロードキャストされました。
信号はそれぞれのアンテナに向かう途中で分割され、90Hzまたは150Hzの低周波信号で振幅変調されました。次に、2つの信号は、滑走路正中線のわずかに左(90)と右(150)、または滑走路の上(90)と下(150)に向けられた大きな放送パターンを生成する指向性アンテナから送信されました。パターンは比較的広く、中央で重なるように狙いを定めており、飛行するのに適切なラインを示しています。
このシステムは機能し、1940年代の技術を使用して実装するのは比較的簡単でしたが、着陸時にガイダンスを提供するのに十分な精度ではなく、数百フィートのオーダーの精度でした。ILSアプローチは、滑走路上200フィートで終了しました。その時点で、パイロットは滑走路を視覚的に確認するか、アプローチを中止する必要がありました。これは、真に自動化されたシステムには十分な精度ではありませんでした。
この問題を解決するためのBLEUの最初の試みは、アンブローズ水路のパイロットケーブルと同様に、滑走路の両側に沿って伸びる1マイルの長さの2本のケーブルを配置することでした。航空機の検出器は、ケーブルからの信号を確認し、滑走路の正中線に沿って非常に正確に位置合わせすることができます。垂直誘導のために、BLEUが開発した新しいFM電波高度計は、低高度で2フィートまでの高さの違いを解決することができました。チームは、このシステムを使用して何千ものテスト着陸を安全に実施しました。
BLEUは、ほとんどの空港に1マイルのケーブルを配置する余地がないことに気づき、無線駆動のソリューションに取り組み続けました。 BLEUは、Smiths Industries Ltd.と共同で、ガイダンス信号からオートパイロットへのコマンドを導出するためのカップリングユニットとオートスロットルも開発しました。
システムのコンポーネントは、ランカスター、バイキング、デボン、アルベマールなど、いくつかのタイプの航空機で個別に開発されました。使用される技術のデモンストレーションは、月1949年の軍事や政府代表者に与えられた 1950年までに全体のシステムはDHデボンにインストールされていたとオートランドの最初のデモが1950年7月3日にその航空機に与えられた次の20年間、BLEUは、英国の産業および英国の耐空性当局と協力して、これらの実験的デモンストレーションの概念を大型輸送機による安全で正確なブラインド着陸に変換するために必要な先駆的な作業のほぼすべてを担当しました。 2000年代初頭に使用されていたシステムは、基本的に1950年に実験的に使用されたものと同じです。次の図は、JS Shaylerの1958年の覚書から、システムのさまざまなコンポーネントとガイダンス信号が連続してどのように使用されたかを示しています。自動着陸のフェーズ。
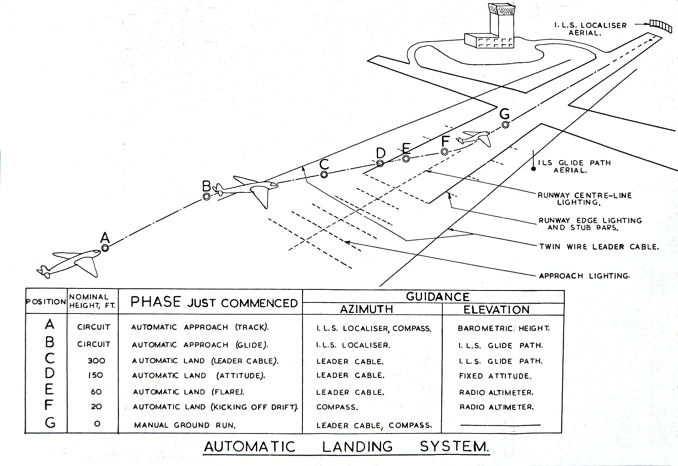
1958年にJSShaylerによって説明された、自動着陸システムのフェーズ
1950年代と1960年代のBLEU
1950年代初頭、完全なオートランドシステムの開発の準備として、バレッタ、メテオ、キャンベラの航空機で自動接近試験が実施されました。キャンベラ、VN799は1953年に買収されましたが、幸いなことに乗組員に重傷を負わずに、ダブルエンジンの故障のためにその年の8月に墜落した後の償却でした。
当時、オートランドは、RAF戦闘機軍団の航空機の迅速な着陸、パイロットの視覚補助、滑走路進入灯、バーブロとのDMEを使用した進入補助など、他のプロジェクトに集中していたため、優先度が低くなりました。上の自動着陸のための業務要件947(OR947)とき変更されたことをV-フォースの爆撃機の艦隊が1954年に発行されたその時にV-爆撃機力が西の戦略的原子力発電への英国の主要な貢献したそして全天候型の運用が不可欠でした。民間航空の自動着陸にも新たな関心が寄せられました。開発の次のステップとして、デボンからフレアアウトカップリングユニットは、スミスタイプDの自動操縦装置に連結し、内に設置バーシティ WF417デボン州の38人ではなく10を運ぶことができる、はるかに大きい航空機。最初の完全自動進入および着陸は、1954年11月11日に、穏やかで霧の深い条件下でWF417によって行われました。同様のシステムがキャンベラWE189に設置され、ジェットタイプの航空機へのオートランドの最初のアプリケーションを提供しました。自動アプローチと自動着陸はWE189によって記録されましたが、適切なリーダーケーブルが設置されていたウッドブリッジの施設がBLEUで利用できなくなったため、1956年4月に開発が中断されました。オートフレアと自動キックオフドリフトの開発はRAFWitteringで継続されましたが、その年の9月、Witteringでのテストから戻ったWE189は、マートルシャムヒースの基地に戻ったときのアプローチでエンジンの故障によりクラッシュしました。パイロット、Flt。レ・コー中尉とプロジェクトを担当したBLEUの科学者ジョー・バークル氏が殺害された。
1957年の初め、BLEUはマートルシャムヒースから、RAEベッドフォードの基地であるサーリーにある新しく装備された飛行場に移動しました。開発は第三のキャンベラ、継続しWJ992で得られた結果に基づいて、WE189。WJ992での実験飛行は、1957年後半に始まり、1958年3月にオートスロットルによる自動着陸に至りました。以下のメモは、開発を実施したBLEU技術者のログブックからのものです。 1958年3月10日(そのプログラムの38回目の飛行) ):「ドリフトはほとんどなく、約0.3g –高さ150-55-15-0」。それは手動スロットルでしたが、強い横風の中、3月12日に自動スロットルが使用されました。3月17日には「強い追い風、20〜25 kt、はっきりとした浮き」が見られ、6月20日には、さらに20回の飛行中に調整した後、「悪くない–主輪で約0.7 g、ドリフトOKを開始」しました。その後、6月26日に「50フィートでスロットルがオフになります。非常に満足のいく結果が得られます」と8月20日に「手と足がオフになります」。その航空機の自動着陸の記録は、1958年7月8日、フライト番号で開始されました。69.キャンベラ航空機の自動着陸の結果は、「中型ジェット機」に関して、1957年にウッドによって引用され、1959年にチャーンリーによって発表されました。 1958年10月までに、BLEUは、主にキャンベラとバーシティの航空機で、2,000を超える全自動着陸を完了しました。
もともとシークレットとして分類されていたバルカン XA899にオートランドを設置して開発するVボマープロジェクトは、キャンベラとバーシティの作業と並行して実行されました。バルカンへの最初の自動着陸は1959年12月から1960年4月の間に行われた。その年の後半に試験が行われ、このシステムは1961年に兵役に受け入れられた。
一部の空港ではリーダーケーブルが実用的ではないことが認識されていましたが、ILSを改善できれば、リーダーケーブルを省略できる可能性が1950年代初頭にBLEUによって開発されたナロービームローカライザー空中システムと、1958年までに、方位角ガイダンスにILSローカライザーのみを使用して自動着陸が行われたことにより、ある程度の改善が見られました。これには良い場所が必要でしたが、1960年代初頭までに、Standard Telephones&Cables(ST&C)によって開発されたILS送信機の根本的に新しい空中設計により、リーダーケーブルを省略できる程度にILSが改善されました。
長年にわたり、英国航空省と米国連邦航空庁(FAA)の間で、視界不良の着陸のためのガイダンス支援について話し合っていました。アメリカ人は、英国で好まれている完全自動システムよりも、パイロットのための改良された援助を備えた「パイロット・イン・ザ・ループ」技術を好みました。1961年、「BLEU自動着陸システム」の経験を積むために、FAAはシステムの設置とテストのためにダグラスDC-7をRAEベッドフォードに送りました。その後、アトランティックシティに戻る際のさらなるテストの後、FAAは確信し、その後、後に国際的に採用された全天候型の問題に対する完全自動の解決策を強く支持しました。
その段階まで、オートランドシステムは「シングルレーン」またはシングルチャネルシステムとしてのみ実現されており、機器の障害から保護するための冗長性はありませんでした。1950年代後半から1960年代初頭にかけて、BLEU、英国民間航空局(CAA)、および航空業界の企業とBEAおよびBOACとの協力が強化され、最大許容故障率の仕様に関する安全要件が定義されました。 1961年、CAAの英国航空登録委員会(ARB)は、1965年にICAOによって採用された気象視程カテゴリの定義の基礎を形成する作業文書BCAR367「自動フレアおよび自動着陸の耐空性要件」を発行しました。 1959年、BEAとBOACは、オートランドに基づいてトライデントとVC10の自動着陸を開発する契約を結びました。トライデントは、共通の要素を持たないトリプレックスシステムを使用したため、3つのチャネルのいずれかで障害を検出し、そのチャネルを排除できました。「妨害切断」はそのシステムの初期の問題であり、最終的には業界によって解決され、制御された程度のロストモーションを備えたトルクスイッチを使用していました。BEAのトライデントフリートでのカテゴリー3運用のためのオートランドの導入には、BEA、ホーカーシドレーアビエーション、スミスインダストリーズ、およびBLEUによる多大な努力が必要でした。三重システムは、イギリス空軍のベルファスト貨物船のためにスミスとBLEUによっても開発された。
VC10は使用エリオットは、監視対象システムの重複しました。その後、コンコルドシステムは基本的にVC10システムの改良版であり、1960年代後半の電子回路技術の進歩の恩恵を受けました。1980年までに、トライデントは50,000を超える稼働中の自動着陸を実行しました。VC10は、経済的な理由から1974年にシステムの使用が削減される前に、3,500回の自動着陸を達成しました。1980年までに、コンコルドは旅客サービスで約1,500回の自動着陸を実行しました。
BLEU(1974年にRAEの運用システム部門に改名)は、DHコメット、BAC 1–11、HS 748(1994年にRAEBedfordが閉鎖されるまで、10年以上にわたってBLEU実験の主要な「作業馬」であり、VC-10でした。
BLEUシステム
BLEUは、理想的なシステムには、地上および航空機に基づくコンポーネントが必要であることを知っていました。前者のシステムは、ケーブルベースのシステムの土地利用の問題やILSの精度の問題のない信号で構成されている必要が到着するすべての航空機には、信号を受信するためのセンサー、超精密高度計、および信頼性の高い自動操縦装置が装備されている必要が気圧高度計時点で使用中では高度の概算を提供することができるだけであったので、BLEUは、平面ベースに開発レーダ高度計の平面が着陸用にフレアするときに知っていたように、そのビームを補完します。
BLEUの仕事は、飛行機の着陸を制御するための名を冠したシステムをもたらしました。ノエル・アダムス中尉は、1950年7月3日にBLEUのテスト機であるビッカースバーシティに最初の自動着陸を行った。システムの成功を実証した後、BLEUはそれが安全であることを証明する必要がありました。必要な基準は、どの着陸システムも、1,000万回の着陸ごとに複数の事故を引き起こすことはできないというものでした。 BLEUのエンジニアは、テストパイロットがバーシティに無数の自動着陸を行ったため、システムの改良を続けました。霧のため閉鎖されたとき、彼らはロンドンヒースロー国際空港にテスト着陸しました。
1959年の論文で、当時BLEUの監督だったジョン・チャーンリーは、統計結果の議論を次のように述べています。パイロット、それはまた、はるかに正確に操作を実行します。」このシステムは1964年に商用利用が承認され、1964年11月4日、キャプテンエリックプールは40メートルの視界を持つ英国欧州航空のフライトをヒースロー空港に着陸させました。 。
遺産
BLEUはオートランディングの開発において重要な役割を果たし、そのシステムの子孫は今日でも世界中で使用されています。
ノート
^ これの完全な技術的説明は、RAF Museum Hendonのアーカイブ、参照X005-4863で入手でき、ボーイング247DZ203のオリジナルの写真記録が含まれています。
参考文献
^ 略語のオックスフォード辞書。オックスフォード大学出版局。1998.p。60. ISBN 978-0-19-280073-2。
^ ジェームズフラー安全は事故ではなかった:英国民間航空飛行ユニットカフーの歴史1944-1996。トラフォード出版。NS。152. ISBN 978-1-4669-6893-6。
^ GC Peden武器、経済学および英国の戦略:ドレッドノートから水素爆弾まで。ケンブリッジ大学出版局。NS。66. ISBN 978-1-139-46292-1。
^ 「1932年の成果」。科学ニュースレター:399。1932年12月24日。
^ ハーストマガジン(1938年4月)。ポピュラーメカニクス。ハーストマガジン。NS。544 ISSN 0032から4558まで。 ^ ewen Tenbyその他。Lulu.com。NS。329. ISBN 978-1-4092-1833-3。
^ Conway、Eric M.。「ブラインドランディングの政治」。テクノロジーアンドカルチャー:81–106。
^ RWハワード(1973)固定翼航空機の自動飛行制御–最初の100年間、The Aeronautical Journal、1973年11月、p。549 ^ マクドナルドJA(1964)Flight International、Letters、p。727 1964年4月30日 ^ ジョン・チャーンリー卿(1989)大統領の演説:航空機への航法援助–全天候型着陸、航海ジャーナル、Vol。42、No。2p。166 http://journals.cambridge.org/abstract_S0373463300014405 ^ TFUレポート70、1945年2月。1944年11月から1945年2月にデフォードで実施された制御されたアプローチと着陸試験に関するレポート。[英国国立公文書館AVIA 7/1599] ^ Michael D. Dobson ed。、(2001)、Wings over Thurleigh、
ISBN 0-9541594-0-3 Chapter 8p。123 ^ TW Prescott(1976)BLEU –最初の10年。RAETech。メモ、FS 77p。21 [英国国立公文書館AVIA6 / 25422] ^ Graham Perry。フライングピープル:毎日、安全なフライングをお届けします。キーパブリッシング。ISBN 978-0-9518958-6-3。
^ JS Shayler(1961年1月)航空機用BLEU自動着陸システムの無線ガイダンス要素、JournalBrit。IRE、UDC621.396.933.23。
^ リードビジネス情報(1961年12月7日)。ニューサイエンティスト。リードビジネス情報。NS。601 ISSN 0262から4079まで。 ^ JS Shayler(1958)自動着陸システムの民間航空への適用、RAEテクニカルノートNo. BL.47 pp 4&8。[英国国立公文書館AVIA 6/17826] ^ リードビジネス情報(1962年11月29日)。ニューサイエンティスト。リードビジネス情報。NS。490 ISSN 0262から4079まで。 ^ BLEU運用命令No.1 / 49、1949年5月12日[英国国立公文書館AIR 29/1295] ^ Michael D. Dobson ed。、(2001)同上。NS。126 ^ ジョン・チャーンリー卿(1989)同上。NS。165 ^ TW Prescott(1976)同上。NS。19 ^ 防衛白書、1960年、パラ。36 [英国国立公文書館CAB129 / 100] ^ RAF Martlesham Heath、Operations Record Books、1951〜1955 [UK National Archives AIR 29/2364] ^ TW Prescott(1976)同上。NS。41 ^ JW Birkle(1956)キャンベラT.4航空機のタイプDオートパイロットの自動接近試験、RAEテクニカルノート番号:BL.41 [UK National Archives DSIR 23/24675] ^ RAF Martlesham Heath、Operations Record Books、1956–1957 [UK National Archives AIR 29/2860] ^ DR Easson、科学者BLEU 1955 –1958の航海日誌のコピー。マートルシャム航空博物館の文書A2669 / D1350 ^ RAEテクニカルノートNo.BL 46、KAウッド、1957年3月。自動着陸誘導のデモンストレーションのための米国ローマ航空開発センターへの訪問に関するメモ(1956年8月)p。17. [英国国立公文書館DSIR23 / 25560] ^ WJチャーンリー(1959)。同上。p 127 ^ WJチャーンリー(1959)同上。NS。127 ^ RAEベッドフォード作戦記録簿[英国国立公文書館AIR29 / 2990] ^ Flt。Lt. AJ Camp AFC(1999)Testing Times、FlyPast、1999年4月 ^ W. Makinson(1953)全天候型着陸、飛行、12月18日、805〜806ページhttp://www.flightglobal.com/pdfarchive/view/1953/1953%20-%201651.html ^ JS Shayler(1958)同上。p.8 ^ Michael D. Dobson ed。、(2001)同上。NS。137 ^ Michael D. Dobson ed。、(2001)同上。NS。148 ^ ジョン・チャーンリー卿(1989)同上。NS。172 ^ KJ Wilkinson(1970)BEAのトライデント作戦における自動着陸–努力と成果のレビュー、The Aeronautical Journal、1970年3月、Vol。74、番号711、pp。187–196 ^ RWハワード(1973)同上。NS。556 ^ RWハワード(1980)セーフティクリティカルアプリケーションでの自動飛行制御の使用の進歩、The Aeronautical Journal、1980年10月、p。318 ^ ハーストマガジン(1965年2月)。ポピュラーメカニクス。ハーストマガジン。pp。113–114。ISSN 0032から4558まで。 ^ リードビジネス情報(1972年2月10日)。ニューサイエンティスト。リードビジネス情報。NS。322 ISSN 0262から4079まで。 ^ WJチャーンリー(1959)。ブラインドランディング。Journal of Navigation、Vol。12、No.2、1959年4月、p 128 doi: 10.1017 / S037346330001794X http://journals.cambridge.org/abstract_S037346330001794X ^ リードビジネス情報(1975年11月13日)。ニューサイエンティスト。リードビジネス情報。NS。398 ISSN 0262から4079まで。 ^ RPGコリンソンアビオニクスシステムの紹介。スプリンガー。NS。434. ISBN 978-94-007-0708-5。
^ チャーンリー、ジョン卿(2011)。「全天候型着陸へのRAEの貢献」。航空史ジャーナル。1。
外部リンク
BOACVC10自動着陸1968
キャンベラのRAEベッドフォードへの自動着陸、1958年”