Common_Berthing_Mechanism
は、CBM開発履歴
共通停泊機構(CBM)は、内居住の要素結ぶ米国軌道セグメントの(ウーソズ)国際宇宙ステーション(ISS)を。CBMには2つの異なる側面があり、結合すると、モジュール間に円筒形の前庭を形成します。前庭の長さは約16インチ(0.4 m)、幅は6フィート(1.8 m)です。前庭の少なくとも一方の端は、より小さな隔壁の貫通によって直径が制限されることがよく
共通結合機構STS-92 MS
Wisoffの信頼醸成措置の間でピア。
タイプ
非両性具有の 停泊メカニズム
デベロッパー NASA ボーイング
長さ
〜16インチ(0.4 m)
直径
〜71インチ(1.8 m)
先制不使用
2000年10月11日
アクティブCBM(タイプI)
質量
540ポンド(240 kg)(指定)
アクティブCBM(タイプII)
質量
685ポンド(311 kg)(指定)
パッシブCBM
質量
440ポンド(200 kg)(指定)
要素は、リモートマニピュレーターシステム(RMS)によって停泊可能な位置に操作されます。アクティブCBM(ACBM)側のラッチとボルトは、パッシブCBM(PCBM)側のフィッティングとフローティングナットを引っ張って、2つを位置合わせして結合します。
前庭が加圧された後、乗組員はいくつかのCBMコンポーネントを取り外して、モジュール間の通路を空けます。ユーティリティコネクタは、向かい合うバルクヘッドの間に取り付けられ、それらを覆うための閉店パネルが付いています。結果として得られるトンネルは、積み込みベイとして使用でき、通常の人員通路を通過できない無人宇宙補給機を訪問することで大きなペイロードを受け入れることができます。
コンテンツ
1 デザインの概要
2 オペレーション
2.1 発売後
2.2 停泊
2.2.1 準備
2.2.2 操縦
2.2.3 メイト
2.3 IVAオペレーション
2.4 デバース
2.5 機会
3 発達の歴史
3.1 起源(1984年頃以前)
3.2 高度な開発/フェーズB(1985年頃– 1988年頃)
3.3 宇宙ステーションの自由(1989年頃– 1992年頃)
3.43.4 ISSへの移行(1993 – 1996年頃)
3.5 資格(1994年頃– 1998年)
3.6 フィールドの変更(2000年頃-現在)
4 ギャラリー
4.1 設計
4.2 オペレーション
5 ミッション
6 用語集
7 メモと引用
8 参考文献
8.1 レポートおよびその他のディストリビューション
8.2 ステータスページ
9 外部リンク
10 も参照してください
デザインの概要
その他のグラフィック
については、デザインギャラリーを
参照してください
すべてのCBMタイプは、親モジュールの製造中に圧力シェルにボルトで固定されるアルミニウムリングを備えています。ボルト継手は、2つの同心Oリングシールを圧縮します。1つはシリコン(温度性能を向上させるため)で、もう1つはフルオロカーボン(スクラブに対する耐性を向上させるため)です。リングの嵌合ペアは、生命にかかわる圧力負荷の主要な構造であるため、リングとシールはモジュールシェルと同じ基準で設計されています。一次シールが劣化した場合、CBMの一部として設計および認定された二次シールによって補強することができます。二次シールは、車内活動(IVA)として取り付けることができます。
前庭のボリュームの大部分は乗組員の通過のために予約されており、通常、通路の境界としてハッチの周囲に見切りが設置されています。ほとんどの場所で、ボリュームは見切りの外側のユーティリティ接続用に予約されています。ユーティリティのセットは、結合されたモジュールの各ペアに固有です。
主要なCBMタイプ

ACBMタイプI
ACBMタイプII
PCBM(ジェネリック)
資格のある部品番号のアーティストレンディション
その構造的特徴に加えて、ACBMは停泊に関連する基本的な機能を実行および逆転させます:
モジュール間の距離が変化すると、位置合わせにより、6つの自由度のうち5つでモジュール間の動きが物理的に制限されます。制約は、構造コンポーネントの連続するセットによって課せられます。 着信モジュールがラッチの届く範囲に正しく配置されると、キャプチャラッチを操作する準備ができていることがRMSオペレータに示されます。ラッチ準備完了表示は、4つのメカニズムによって提供されます。各象限に1つ、各ラッチに関連付けられています。 着信モジュールは4つのラッチによってキャプチャされます。彼らは、回転と平行移動を組み合わせてそれを描画し、PCBMを小さな残留ギャップでACBMに位置合わせします。 堅固な構造的接続が確立されます。ACBMの16本の動力付きボルトのそれぞれが残りのギャップを横切ってPCBMのナットにねじ込まれます。ボルトは、2つのフランジを徐々に適合させ、CBM / CBMシールを圧縮し、CBM / CBMジョイントに予圧をかける多段階プロセスで締められます。
ACBMには2つの機能タイプが指定されています。 24の独立したメカニズムを補完するタイプIACBMは、親モジュール上で軸方向または半径方向に配向されています。それは6つの軌道方向のいずれかに直面する可能性があり、停泊作業の開始時に広範囲の温度内のどこにでも存在する可能性が
タイプIIACBMは、ポートに何も停泊していないときに親モジュールを保護するコンポーネントを使用して、タイプIの設計を強化します。コンポーネントのうちの4つは、着信モジュールの邪魔にならないように展開できるメカニズムです。他のものは、前庭が加圧された後、乗組員によって削除されます。タイプIIは、ポートが長期間露出する場合、または停泊前の激しい状態が発生する方向に使用されます。タイプIIACBMは、リソースノードの放射状ポートにあり、任意の軌道方向を向いています。

PMA1とPMA2は、ノード1のアキシャルACBMで打ち上げられました。
PCBMには、タイプIACBMのものに対応するフィッティングとアライメント構造が組み込まれています。32のフィッティングは、それ自体がバネ仕掛けのメカニズムであり、ACBMの対応するコンポーネントによってキャプチャおよびリジッド中に作動します。プライマリCBM / CBMシールもPCBMの一部であり、CBM / CBMジョイントがほぼ嵌合しているときに相対運動を安定させるために、プリロードされたスタンドオフ/プッシュオフスプリングが
PCBMには、シールの耐久性のみが異なる2つのタイプが指定されています。タイプIPCBMシールのS383シリコン材料は、タイプIIのV835フルオロカーボンよりも2つのモジュール間の就寝前の温度差を許容します。S383はまた、停泊前に軌道上で遭遇した原子状酸素に対してより耐性がタイプIIは、ACBMまたは同様の飛行支援装置にボルトで固定されている間にシャトルペイロードベイで小さな要素を発射するために使用されました。これは、V835材料が振動によるスクラブの損傷効果に対してより耐性があるためです。
PCBMは、常に親モジュールの端に隔壁に取り付けることも、停泊前に真空に開放されている一次構造のバレルセクションのエンドリングとして取り付けることもできます。 PCBMは、広範囲の熱質量を持つモジュールに取り付けられているため、広範囲の初期温度条件を経験することも操作の性質上、PCBMは常にACBMとは反対の飛行方向を向いているため、温度差が大きくなる可能性が
オペレーション
その他のグラフィックについては、オペレーションギャラリーを参照して個々の停泊イベントについては、ミッション表を参照して
発売後

STS-130 MS Robert Behnkenは、ノード3のNadirACBMのEVA準備中に休憩します。
ACBMは、軌道上での最初の使用に備えるためにEVAを必要とします。タイプIACBMは、通常、アキシャルポートにあり、通常、2人のEVA乗組員が取り外して収納するのに約45分かかる「シャワーキャップ」カバーが付いています。ノードラジアルポートにあるタイプIIACBMは、展開可能なM / Dカバーの発射制限を解除する必要がバネ仕掛けのカバーを解放するには、キャプチャラッチを作動させて後で再び閉じる必要があるため、ラッチ準備完了インジケーターが作動します。検査を含めて、各ラジアルポートは1人のEVA乗組員のために約15分の予算があり、必要に応じてIVA乗組員がACBMを操作するのを支援します。
NSTSで発売されたフルサイズの要素には、PCBMのシールを覆う保護カバーがありました。2人のEVAクルーメンバーは、PCBMのカバーを取り外して収納し、シールを検査し、必要に応じてクリーニングするのに、それぞれ40〜50分かかりました。カバーが取り付けられていないため、発射インターフェースとして使用されるタイプII PCBMは、ボルトを外した後に検査されました。ロジスティクスフライトの場合、検査はカメラのみで行われます。
停泊
準備
メディアを再生する
第56次長期滞在中のアクティブな共通結合機構のチェックアウト(実際の速度の約10倍)。
PCBMは、打ち上げ後に必要なものを超えて停泊するための準備を必要としません。停泊のためのACBMの準備には、サポートユーティリティ(電源、データ)の選択から始まり、各コントローラーパネルアセンブリ(CPA)の順次アクティブ化まで、約1時間かかります。2つのCPAがプライマリおよびセカンダリマスターコントローラとして選択されています。
アクティベーションは、ビルトインテストを実行し、アクチュエータの位置カウンタを初期化します。各ボルトアクチュエータは2回転延長され、次に3回転収縮して、ボルトとモーターの両方の操作性を確認します。ラッチは、ノードラジアルポートの場合、M / Dカバーを展開する開位置に一度に1つずつ駆動されます。20個のアクチュエータすべてが動作初期位置に設定されています(ボルトの場合は0回転、ラッチの場合は202°)。ラッチが完全に展開され、嵌合する廊下と表面に障害物がないことを確認するために、リモート検査が実行されます。
準備中に考慮される不測の事態には、ACBMリングの表面のクリーニング、M / Dカバー、CPA、キャプチャラッチ、および準備完了インジケーターを含むEVA是正措置が含まれます。CBMへの電力および通信サポートの喪失に対して特定の解決手順が利用可能です。
操縦
PCBMを装備したモジュールは、遠隔ロボットで操作されるリモートマニピュレーターシステム(RMS)によってキャプチャエンベロープ内に操作されます。モジュールの停泊には、6ジョイントシャトルRMS(SRMS、または「カナダアーム」)と7ジョイント宇宙ステーションRMS(SSRMS、「カナダアーム2」)の2つの異なるRMSが使用されています。

ISS Expedition 10 Cmdr Leroy Chiaoは、DestinyLabからSSRMSを運用しています。
操縦操作は、RMSエンドエフェクタによるペイロードの取得から始まります。このステップは、さまざまに「キャプチャ」または「グラップリング」と呼ばれます。NSTSの時代には、ペイロードは通常、シャトルのペイロードベイに到着しました。グラップル中、SRMSのジョイントは「リンプ」され、ペイロードの正確な位置にその姿勢を合わせることができました。SSRMSは通常、ISSに対して一定の距離と向きを維持するために、それ自体を操作した自由飛行ペイロードに取り組みます。組み付けられると、RMSはそのジョイント角度を変更することによってモジュールを移動します。モジュールの動きは、多くの場合、ソーラーアレイなどのISSの他の可動部分と一緒に振り分けを行う必要が

メディアを再生する
STS-98のシャトルRMSを使用した3つの停泊操作のNASAアニメーション。
PCBMの動きに関する視覚的なフィードバックは、少なくとも2つの専用システムによってRMSオペレーターに提供されています。初期のバースは、スペースビジョンシステム(SVS)と呼ばれる写真測量フィードバック技術を使用して誘導されました。これは、一般的な使用には不適切であるとすぐに判断されました。SVSは、STS-98で最初に使用されたタスク専用のCenterline Berthing Camera System(CBCS)に置き換えられました。
RMS操作を完了するために必要な時間は、従うべき軌道と、対応する必要のある操作上の制約に完全に依存します。同じことがすべての緊急時対応計画にも当てはまります。操縦の終わり近くで、PCBMがACBMと噛み合い始めると、オペレーターは狭い廊下を交渉します。RMSオペレータがターゲットACBMで4つのReady-to-Latch表示を確認するか、3つしか達成できないと結論付けたときに、操作は終了します。RTLはバネ仕掛けのメカニズムであるため、RMSは最終的にエネルギーを蓄積し、分離力に耐えられる状態のままになります。
メイト
CBMの2つの半分は、名目上3つの操作で結合されます。
Captureは、ACBMのジオメトリに関して、着信PCBMを取得して位置合わせします ナットアクイジションは、各パワードボルトをそれぞれのナットにねじ込みます ボルトアップは、2つの半分の間のジョイントを完全にプリロードします
少なくとも2つの異なるキャプチャプロトコルが軌道上で実行されました。どちらのプロトコルも、185°から187°の間の指定されたシャフト角度に対して「第1段階」のキャプチャコマンドを発行します。第1段階のキャプチャでは、各ラッチがそれぞれのフィッティングの上に配置されていることを確認します。これは、スイッチの状態を評価することで動作が確認されます。RMSは引き続き要素の位置と方向を制御し、キャプチャラッチによって加えられる負荷は低いままです。完了するまでに約15秒かかり、第1段階のキャプチャは、地上管制官がほぼリアルタイムで進行状況を監視できる軌道領域に制限されます。停泊要素が大きい場合にスプリアス荷重を制御するために、ステーションの姿勢制御システムをフリードリフトで維持し、乗組員の運動を禁止することができます。
2つのプロトコルは、ラッチが2つの半分をパワードボルトの届く範囲に引き込む方法が異なります。NSTSの時代には、SRMSが「テストモード」になった後、単一の第2段階の「キャプチャ」コマンドが発行されました。SSRMSを使用すると、公称外のブレーキイベントが発生した場合にアームブームに負荷が蓄積する可能性を制限するために、5段階のキャプチャが実行されます。いずれの場合も、キャプチャドライブは約108秒の作動時間で12°の指示されたシャフト角度にラッチを駆動します。どちらのプロトコルでも、RTLの残留エネルギーにより、ラッチが187°の開始位置よりかなり下になるまでフィッティングに「フック」されないため、RTLが一時的に開く可能性が

STS-120 / FD04 Execute Pkgからのこの停泊タイムラインでは、RMSとCBMの操作がそれぞれ黄色と青色で強調表示されています(NASA / MCC、2007年)。制限は赤で強調表示されます。パワードボルトコマンドは、第2段階のキャプチャ後に地上管制官によって発行されました。
キャプチャプロセスが正常に完了したとオペレータが判断すると、16個の電動ボルトすべてが5 rpmで作動し、プリロード制限は1,500 lbf(6,700 N)になります。サーマルスタンドオフがそれぞれのストライクプレートに接触し始めると、結果として生じる荷重が各ボルトのロードセルによって報告されます。この「ABOLT」フェーズは、トルク、回転、または指示された負荷に基づいて、ボルトごとに個別に終了します。先に仕上げたボルトは、後続のボルトがナットを固定するときに、示された荷重の変化を確認できます。地上にいる可能性のあるオペレーターは、結果の状態を評価して、負荷状態が許容できるかどうかを判断します。もしそうなら、姿勢制御と運動の制限が解除されます。RMSはペイロードを解放(アンラップル)し、他のタスクに進むことができます。
ミッション前の熱分析で、2つのCBMの半分の間の温度差が大きすぎることが示された場合、ABOLT状態が長期間保持されます。「サーマルホールド」により、両側を共通の温度に近づけることができます。次に、電動ボルトを6段階で締めて完全な予圧をかけます。各コマンドは、90°間隔で一度に4本のボルトに発行されます。一部のステップは、オペレーターの裁量により、複数回実行される場合が最終的なボルトアップ作動の予算は60分ですが、増分プリロードの反復が何回実行されるかによって、かなり変動する可能性が
オペレーターがボルトアッププロセスが正常に完了したと判断すると、ラッチは「閉じた」位置に命令され、CPAは非アクティブ化されます。電源、実行コマンド、およびデータリソースは、他のタスクへの再割り当てに使用できます。
いくつかの非名目上の状況への適応は、CBMの設計に固有のものです。嵌合操作中の単一のボルトの故障は、CBM / CBMシールによって対応でき、前庭が大気圧を保持できるようにします。2つのボルトの故障は、それらが互いに隣接しておらず、前庭が加圧されていない限り、機械的負荷に耐えることができます。単一のラッチおよび単一のReady-to-Latchインジケーターの喪失は、ミッションの成功を損なうことなく許容でき、ラッチ自体は、SRMSの「ブレーキオン」障害モードの可能性に対応するように設計されています。電力と通信の損失に関する詳細な解決ロジックが利用可能であり、フィッティングを「見逃す」か、部分的なストロークで詰まるラッチの解決シーケンスも利用できます。運用のこの段階での緊急時の手順は、ISSRMSまたはシャトルの他のシステムが即時の出発を必要とした場合のSSRMSの異常なブレーキングと「迅速な安全」にも対処します。
IVAオペレーション

STS-92パイロットの
PamelaMelroyは、ノード1の天頂前庭からクリアされる2つのコントローラーパネルアセンブリ(CPA)を識別します。
前庭の艤装には、機器のセットアップ、リークチェック、および機械的な再構成が含まれます。必要な時間と労力は、ACBMの構成、削除するCBMコンポーネントの数とタイプ、および2つの要素間に接続するインターフェイスによって異なります。少なくとも場合によっては、ハッチを前庭に開く前に、圧力減衰によって延長された「ファインリークチェック」を実行するためにその時間が一時停止されることがありますが、10時間もの予算が立てられる場合が
それらは前庭を介して乗組員の廊下と重なっているため、CPAは常に片付けなければならず、新しく停泊した要素のハッチ全体のカバーを常に取り外す必要が要素が長期間嵌合したままになる場合は、安全な保管または再利用のために他のCBMコンポーネントを取り外すことができます。ノードラジアルポートは、M / Dカバーの中央セクションの取り外しと保管にさらに20〜40分かかります。見切りパネルは、通常、前庭の周囲の破片の段階的な収集を軽減するために、2つの向かい合うハッチビームの内周の周りに設置されます。
内部でアクセス可能なコンポーネントについては、修理と予防保守の両方に対応する詳細な緊急時の操作が事前に準備されていました。前庭の大気漏れを特定するための一般的な手順は、少なくともISS組立段階4A以降に存在し、3セットのIVAシールすべての緊急時の設置手順も同様です。CPAコネクタ(地上と軌道の両方)への損傷の報告は、STS-126でのリスク軽減手順の展開につながりました。
デバース
エレメントを取り外すと、基本的に停泊のプロセスが逆になります。それは前庭が操作のためにどのように構成されたかの詳細によって異なります。最も一般的に遭遇する実装は、ノードラジアルポートからロジスティクス要素をデバースするように再構成するときに前庭を装備解除することから始まります。手順は当初、2人の乗組員と4時間の期間の予算でした。ACBM / PCBMインターフェイスプランと交差するアイテム(見切り、ユーティリティジャンパー、接地ストラップ)を削除し、デメイト操作に不可欠なCBMハードウェア(CPA、サーマルカバーなど)を取り付け、ハッチを閉じます。

STS-135中に
ノード2と
MPLMラファエロの間の前庭を減圧するために使用される機器
続いて、センサーとサポート電子機器、長さ35フィート(11 m)の真空アクセスジャンパーを含む圧力減衰試験装置がハッチの内側に設置されます。これらが所定の位置にあると、前庭は、リークチェックのための滞留期間を含めて、約40分の減圧期間の準備ができています。デメイト中のCBMシールへの損傷を防ぐために、臨界(絶対)圧力目標は2 mmHg(267 Pa)です。
バース前の準備と同様に、サポートユーティリティはCBMに電力とデータを提供するように構成されています。電源が投入され、プライマリおよびセカンダリマスターコントローラーとして使用する2つのCPAが選択され、個々のモーターコントローラーが初期化されます。「DBBoltck」コマンドが電動ボルトに発行され、キャプチャラッチは個別に212°のシャフト角度にコマンドされます。次に、ラッチは公称の「キャプチャ完了」位置である12°に配置されます。CBMは「スタンバイ」状態のままであるか、電源がオフになっています。

メディアを再生する
ハーモニーの天底CBMのカバーの就寝後の閉鎖。
PCBMエレメントをハードメイト状態から解放するには、約90分かかります。それは、16本の電動ボルトすべてを約0.4回転緩めることから始まり、5分もかかりません。ステップが完了した後、16本のボルトすべてに正の残留荷重が必要です。次に、4本のボルトのセットが完全に引き抜かれます。各セットは21.6回転の公称位置に到達するのに約6:30かかります。3番目のセットを取り外す前に、RMSグラップルとフリードリフト姿勢制御を行う必要が16本のボルトがすべて引き抜かれた後、キャプチャラッチが展開され、圧縮されたReady-to-LatchインジケーターがPCBMのアライメントガイドに押し付けられます。離脱する要素はRMSによって操作され、ノードラジアルポートでは、展開可能なM / Dカバーが閉じられます。次に、CPAから電源を切ることにより、ACBMがシャットダウンされます。
デメイト中の不測の事態の解決は、一般に、交配操作の準備と実行の解決と同様です。それらの多くは、CBMコンポーネントの取り外しと交換を可能にするための緊急時の休憩の指示で効果的に終了します。CBMの停泊を解除するために前庭を再装備する努力は、一般的に緊急出発には不適切です。
機会
ISSの当初の設計では、ハビタット要素をノード1(Unity)の天底に面したポートに設置する必要があり、それに応じて隔壁の貫通部が設計されました。ステーションが組み立ての最初のフェーズで成熟するにつれて、ノード3がその場所に計画されました。後に、左舷隔壁への設置が大きな運用上の利点をもたらすことが明らかになりました。残念ながら、ノード1内のユーティリティの元のルーティングでは、変更を有効にするために軌道上で大幅な再作業が必要でした。CBMの直径が大きいため、作業中に圧力を含む見切りとしてPMA3を使用できるため、EVAなしでフィードスルーを取り外して交換することができました。PMA3は、第21次長期滞在中に左舷CBMに移動され、「…飲料水、ISL、1553データケーブル、およびIMV ダクト、ケーブル、ホースの設置…」が準備のために接続されました。ノード3の到着。PMA3を保管場所に戻す前に、再構成されたバルクヘッドの漏れがテストされ、ノード3がSTS-130の新しく準備された場所に設置されました。

第61次長期滞在飛行エンジニアの
ジェシカ・メイアは、8個のCubeSatを搭載したSlingShot小型衛星配備機の前でポーズをとり CBMの深さ、直径、およびアクセス可能性も、SlingShot展開システムからのCubeSatの分配をサポートするために活用されています。フレームワークは、ロジスティクス車両(Cygnusなど)のPCBMの内部エンベロープにマウントされます。ビショップNanoRacksエアロックモジュール(NRAL)を繰り返しバースにACBMとPCBMとの強固なインターフェースを利用し、同様の機能をホスティングしている「ベル」をdeberth。
発達の歴史
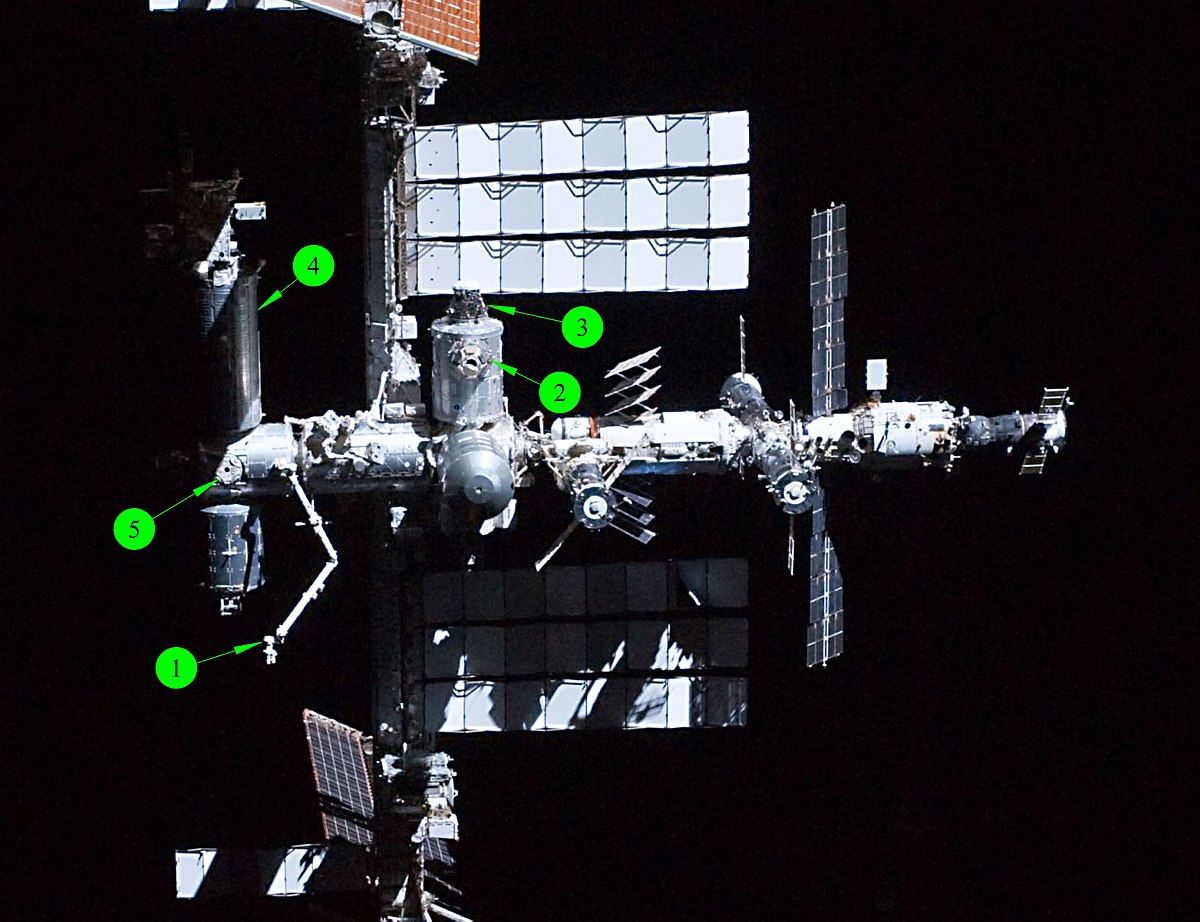
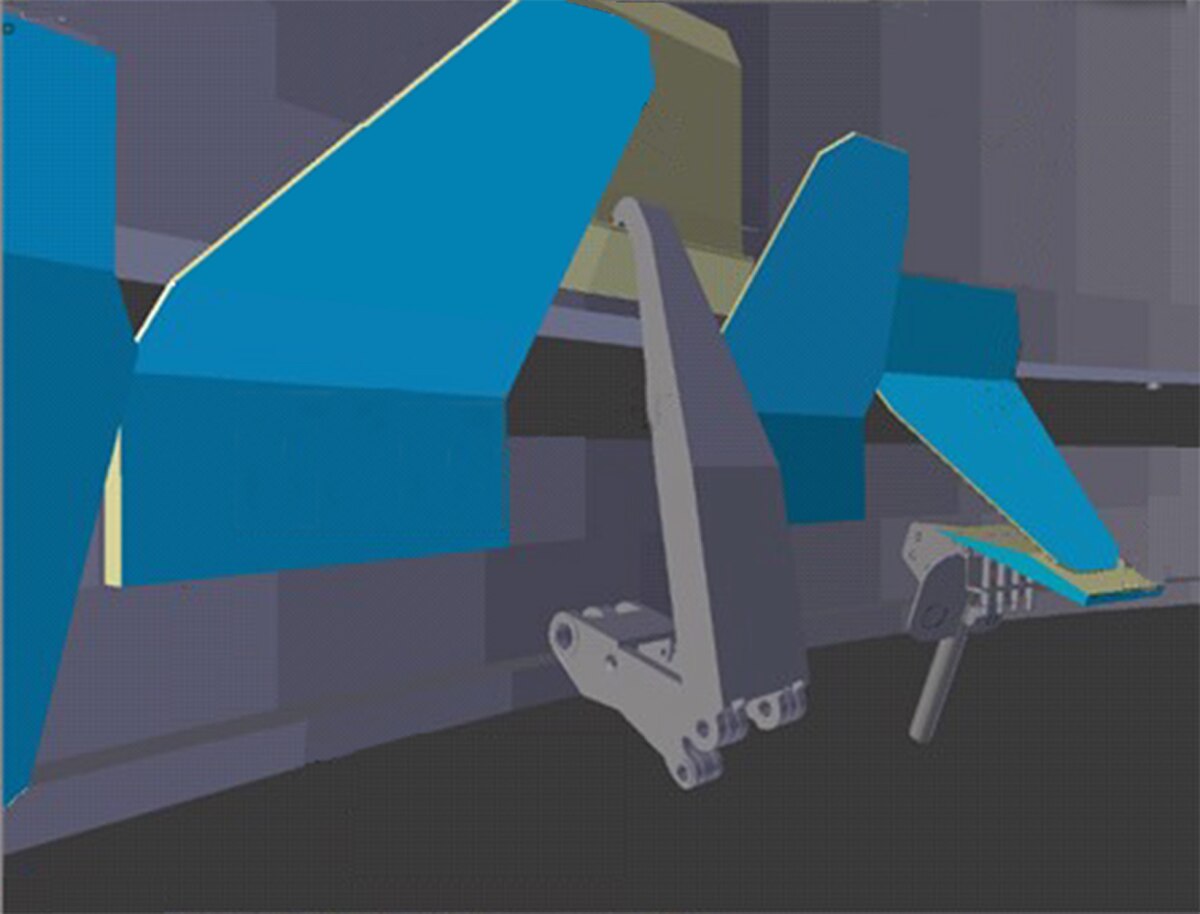
CBMに影響を与える主な要因は、STS-135のドッキング解除後のフライアラウンド中に表示されました
。キャプチャ中のPCBMパスは、RMSによって誘導されます(1)。RMSは、Cupola(2)およびPMA(3)からKibō(4)までの重量のモジュールと相互作用します。質量は照明と相互作用して、CBMリング間の温度差を駆動します。これにより、特にラジアルポート(5)の場合、圧力によるたわみが増加します。
米国の宇宙プログラムの停泊の概念は、ドッキングの進化中に遭遇した軌道力学の問題を軽減するために開発されました。停泊のために特別に開発された最初のメカニズムではありませんが、CBMは、海面圧力を保持する構造ジョイントを組み立てるために米国で特別に設計された最初のそのようなデバイスでした。これは、4つの典型的な機能を統合しています。
加圧された構造物は、他の一次荷重に加えて内圧を受けます。乗組員のいるコンパートメントの圧力船体として使用される場合、それらは生命にかかわると見なされます。その文脈では、負荷、漏れ率、シールの冗長性、検証方法などの問題について特別な注意が払われます。彼らはまた、彼らの失敗の影響を綿密に精査します。
外部フランジは、機械的負荷と、親圧力容器内の圧力によって引き起こされる負荷の両方の影響を受けます。フランジの相対的な剛性によって、自由端の形状がどのように変化するかが決まります。フランジに何かを取り付けている場合は、歪みに対応する必要が
可動機械アセンブリは、姿勢の変化に応じて力の伝達方法が異なります。それらの荷重は内部摩擦の影響を受け、多くの場合、構造よりも多くの解析と設計の反復が必要になります。CBMの場合、ロードパスにはモジュールとRMSの両方が含まれるため、非常に複雑になる可能性が
高真空に耐える構造ジョイントは、ジョイント間のギャップを厳密に制限するように設計されており、それらが組み立てられる条件は慎重に管理されています。CBMの場合、これらの問題は、ボルトアップ中に、バース前のたわみが適合しているためのシールスクラビング、およびジョイントに閉じ込められたほこりや破片によって悪化します。
宇宙船でこれらの機能を使用するには、攻撃的な環境のために特別な考慮が必要です。通常のISS高度255海里(472 km)で、NASAはその環境の7つの要因を特定します。

CBMに当たる流星フラックスの強度は、設置された方向によって大きく異なります。
周囲の中性大気の組成、特性、および状態。特に、原子状酸素(AO)は、多くの材料に対して非常に腐食性がPCBMのフェイスシールなどのエラストマーは、AOに特に敏感です。低圧と低絶対湿度も、多くの材料の組み合わせの摩擦係数に影響を与えます。非常に低い圧力にさらされると、時間の経過とともに特定の材料の化学組成も変化します。
放射エネルギーの強い指向性のソースとシンク。露出した宇宙船コンポーネントの取り付け、光学特性、および絶縁は、許容可能な温度を維持するように設計されています。場合によっては、これらの影響を軽減するために、宇宙船全体の軌道方向が動的に制御されます。
地磁気は(例えばACBMのセンサ、スイッチ、およびコントローラのものなど)の影響を受けやすい電気部品と干渉することができます。影響には、コンポーネントがフィールドを通過する際の完全な障害が含まれる場合が
露出した表面を汚染して帯電させるイオン化ガス。CBMには多くのガスが含まれています。ほとんどの宇宙船は、露出したコンポーネントを注意深く接地することでこの問題に対処しています。
動力機器の電子のエネルギー状態を変える可能性のある電磁放射。モーター、センサー、およびACBMにあるものなどの制御電子機器は、シールドされていない限り、これらの影響を受けやすくなっています。
流星物質と軌道を回る破片。その一部は重くて動きが速く、宇宙船に衝突する可能性がCBMの設計はこの点でいくつかの異なる方法で拡張されていますが、この問題は統合された宇宙船レベルで設計されました。定量的要件は、どちらのCBM仕様にも割り当てられ
重力加速度と遠心加速度(「ゼロ重力」と呼ばれることが多い)のバランス。これは、重力が支配的であるため、地上のメカニズムの動きを検証する上で大きな意味がCBMは、典型的な宇宙船工学の慣行に従い、分析とテストを繰り返して、この条件の設計を開発および検証しました。
これらの機能と要因のいくつかは、ステーションの軌道、構成、成長計画、ロケットの打ち上げ、および組み立て技術に関する長い一連の決定を通じて相互作用しました。停泊作業は、これらの問題に関連する物理学の実用性を探求した1960年代と1970年代のプログラムにその起源がCBMの概念自体は、1980年代初頭のプログラムの最初の研究で現れ始め、概念の複数の反復を経験し、1990年代が終わりに近づくにつれて、最初の飛行要素の発売直前に開発を完了しました。
起源(1984年頃以前)
CBMは、大型宇宙船を組み立てる米国の能力の長い進化における1つのブランチにすぎません。少なくとも1950年代後半には、この機能は「…宇宙ステーションの建設と低軌道での車両の組み立てに必要…」と認識されていました。アポロ計画の終わりまでに、それをサポートするための標準化されたランデブーとドッキングの慣行が実際に証明されました。推進剤管理の基本的な課題はよく理解されており、近接操作中に追跡車両の 推進RCSプルームが目標車両に衝突することから生じる制御の安定性と汚染の問題も同様でした。

ドッキング操作では、ターゲット車両の邪魔にならないように複雑な操作が必要になることがよく
スペースシャトルプログラムの出現により、ドッキングに関するいくつかの問題が軽減されましたが、新しい問題が導入されました。追跡車両と目標車両の質量の大きな違いにより、接触後の運動量の共有が少なくなり、シャトルの質量が大きくなると、アポロで必要とされるよりも大幅に多くのブレーキ推進剤が必要になりました。ターミナルアプローチ操作中のチェイスとターゲットの慣性特性の間の単純な同軸アライメントは、軌道からの復帰中の空力揚力用に設計された非対称オービターでは不可能でした。比較的小型のターゲット車両に大型シャトルRCSプルームが衝突すると、近接操作中のターゲットの向きの制御も妨げられました。これらの問題により、シャトルプログラムのブレーキ戦略が変更されました。すべての戦略がすべての軌道方向に簡単に実装されたわけではなく、それらの方向のいくつかで組み立てる能力を脅かしていました。長いテレロボットデバイス(RMS)を使用すると、最初の接触点を追跡車両から遠ざけることで、その脅威を軽減できました。
1972年までに、シャトルプログラムの要件分析では、ミッションの目的のほぼ40%が、オービターのペイロードベイにペイロードを配置することによる組み立てに関係すると推定されました。当時、回収された宇宙船の多くはそのような運用のために設計されていないことが想定されていたため、ドッキングの問題を解決(または排除)することの重要性がさらに高まっています。停泊操作はそのために開発されました。接触速度がほぼゼロの近くの宇宙船を優しくつかむという要件が、シャトルの計画されたRMSに割り当てられました。RMSを使用して軌道上でオブジェクトを組み立てることは、新しいシステムの位置と方向の両方で精度を高めるための推進要件と見なされていました。
RMS開発の時点では予測されていませんでしたが、この期間には、CBMにとって重要になる要件トピックの出現が見られました。RMS制御の精度と精度、物事を強制的に整列させる能力の制限、および構造的負荷の大きさです。キャプチャ中にブームとジョイントでピークになります。これらは、メカニズムの開発の設計、認定、および運用に不可欠であることが証明されました。

宇宙ステーションタスクフォースは、停泊を主要な組み立て技術として特定しました。
SRMSは、1983年6月のSTS-7まで、最初の回収とペイロードベイバースを達成しませんでした。最初の運用日は、NASAの宇宙ステーションのニーズ、属性、および建築オプション調査の8社の請負業者による最終報告書の提出から2か月後です。。最終調査報告書が作成された時点では飛行結果は入手できませんでしたが、少なくとも3つは、シャトルのペイロードベイに納入された加圧モジュールから宇宙ステーションを組み立てる主要な手段として「停泊」を特定しました。説明および図示された概念のうち、CBMの最終的な設計に強く類似しているものはなく、技術的な詳細についての議論はほとんどありません。
1984年の初めに、宇宙ステーションタスクフォースは、2つのモジュールが互いに接触し、その後ラッチするときに発生する負荷を減衰させる停泊メカニズムについて説明しました。接触状態は重要であると特定されましたが、その時点では定量化されていませんでした。内部通路の直径についても同様です。「両性具有」と同様に、モジュール間のユーティリティの内部接続が明示的に必要でした。標準化されたバースメカニズムは、モジュールポートの外部フランジとして認識され、「6ポートマルチバースアダプター」は、最終的なリソースノードの概念にほぼ対応していました。円筒形モジュールの放射状に配向されたポートに作用する内圧によって引き起こされるたわみは、重大な発達上の問題として認識されるようになりました。タスクフォースの最終報告も、「共通結合機構」への最も初期の言及の1つであるように思われる。
高度な開発/フェーズB(1985年頃– 1988年頃)

停泊に関する知識ベースは、他の停泊メカニズムが開発されるにつれて、1980年代を通じて成長しました。これらには、フライトサポート構造ラッチ(ここに表示)やシャトルの
ペイロード展開および取得システムなどのシステムが含まれていました。
進行中のシステムレベルの構成研究と並行して、NASAは、高度なドッキングおよび停泊メカニズムのコンセプト開発プロジェクトが「…ドッキング負荷(0.1フィート/秒未満の速度)を大幅に削減し、ペイロード停泊機能を提供する」と予想しました。 。1984会計年度から開始されます。」
Berthing Mechanism Advanced Developmentプログラムは、実際には1985年に開始され、マーシャル宇宙飛行センター(MSFC)の6自由度テスト施設での本格的なテストにつながりました。その取り組みにおいて、「共通」とは、メカニズム設計の単一のファミリーが停泊とドッキングの両方を達成し(両方の異なる要件を継承)、ファミリーのどのメンバーも他のメンバーと参加できることを意味しているようです。「アクティブ」および「パッシブ」とは、ドッキング後の残留運動エネルギーの減衰のためのメカニズムが提供されているかどうかを指します。2つの異なる設計(速効性と遅効性、それぞれ短距離と長距離)のモーター展開キャプチャラッチが船外半径に取り付けられました。外向きのガイド花びらも外側の半径に配置され、メカニズムの全体の直径は約85インチになりました。

NASAアーティストのモジュールの概念(1989年1月)。
構造ラッチは、公称直径0.500インチの「ボルト/ナット構造ラッチ」によって実現されました。10,000 lbf(44,500 N)の引張荷重用に設計され、ボルトとナットの両方がA286鋼で製造され、DOD-L-85645で指定されている二硫化タングステンドライフィルム潤滑剤でコーティングされています。ボルト/ナットの位置は、直径63インチの圧力壁の周囲で交互に配置され、両方のリングの面にシールが含まれているため、メカニズムはアセンブリレベルで効果的に両性具有でした。ボルトは、バルクヘッドを通る密閉されたドライブ貫通部を使用して、手動で作動するように設計されています。電動トルクのオプションが特定されましたが、設計されボルトは、ヘッド側またはナット側のどちらからでも締めることができます。トルクも予圧の不確かさも、入手可能な文書には報告され
この研究の4つのバリエーションの1つには、アルミニウムベローズが組み込まれており、モジュールのループを閉じることができます。内圧によって引き起こされる引張荷重は、ベローズの外側に配置された47個のプーリーに通された連続ケーブルループによってベローズを横切って運ばれました。ベローズの設計に関するすべての問題が、開発テストシリーズの終わりまでに完全に解決されたようには見えません。
寸法は内部ユーティリティ接続と50インチ四方のハッチウェイに対応していましたが、メカニズムエンベロープは、USOSリソースノードの最終的に凹んだラジアルポートの場所との互換性が制限されていました。ラジアルポートの場所との明らかな非互換性は、ノードのまだ不安定な構成によって説明される可能性が一部の構成では球形の10ポートモジュールとして示されていますが、他の構成では円筒形の3ポートモジュールとして示されています。当時のベースラインステーション構成の他の多くの機能も、最終的なISSとはかなり異なっているように見えます。
宇宙ステーションの自由(1989年頃– 1992年頃)
米国のラボモジュール「Destiny」の組み立て中にここに表示される4つの「スタンドオフ」は、ユーティリティ(電力、データなど)をラックに分配するためのスペースを提供します。このアーキテクチャのアプローチは、CBMの大口径の起源でした。
1990年が近づくにつれ、CBMのサイズは、モジュールの設計に対する特定のエンジニアリングアプローチによって安定していました。NSTSペイロードベイの円形断面によって間接的に制約され、モジュールの内部ボリュームは11の領域に分割されました。モジュールの長さを走る中央通路は、4つの機器バンクに囲まれています。機器バンクは、圧力シェルのほぼ全長を走る4本の線に沿って合流します。これらのポイントのすぐ外側では、くさび形のユーティリティボリュームが通路と平行に走っています。ユーティリティの実行により、長さに沿って多くのステーションからタップすることができます。軌道上で結合された後のモジュール間のユーティリティ接続を容易にする他の機器は、モジュールの円筒形部分よりもエンドコーンボリュームに効率的にパッケージ化されます。モジュール間を接続するためのこれらのユーティリティ実行の貫通は、前庭のレイアウト、したがってCBMのレイアウトで大きな注目を集めました。
機器の各バンクは、ステーションの機能を修復、アップグレード、または拡張するために軌道上に設置できる標準サイズの「ラック」に分割されました。関連機器を保持するラックを統合し、打ち上げ前に地上で受け入れテストを行うことができます。統合へのこのアプローチは、より小さなコンポーネントの交換を使用して利用可能であったよりも高いレベルの検証を容易にし、「… 30年の寿命にわたってモジュールの再構成を容易にします」。また、モジュールの最初の起動から重いラックの一部を移動することにより、アーキテクチャが軌道傾斜角のその後の変化に対応できるようにしました。共通のハッチとCBMの両方の特徴的なサイズと形状により、軌道上でモジュールに大きなラックを出し入れできるため、このモジュール統合の概念が可能になりました。

宇宙ステーションの自由プログラムのための3つのCBM構成、Illi(1992)および
Winch&Gonzalez-Vallejo(1992)の詳細なイラストを使用した現代的な構成
この時間枠での他のシステムレベルの決定も、CBMの最終的な設計に影響を与えました。ドッキングと停泊の両方に「共通の」メカニズムのアイデアは破棄されたようであり、これらの個別の操作のそれぞれに固有の主要なメカニズムが特定されました。さまざまなラジアルポート構成を備えた「共通の」モジュール圧力シェルの概念は、少なくとも1991年までNASAによって研究されていましたが、円筒形の一端の近くに4つのラジアルポートを持つ専用の「リソースノード」を優先して破棄されました。圧力シェル。「モジュールパターン」の閉鎖は、1992年までに初期のシステムレベルの設計から延期され、PCBMのベローズベースのバリアントが排除されました。
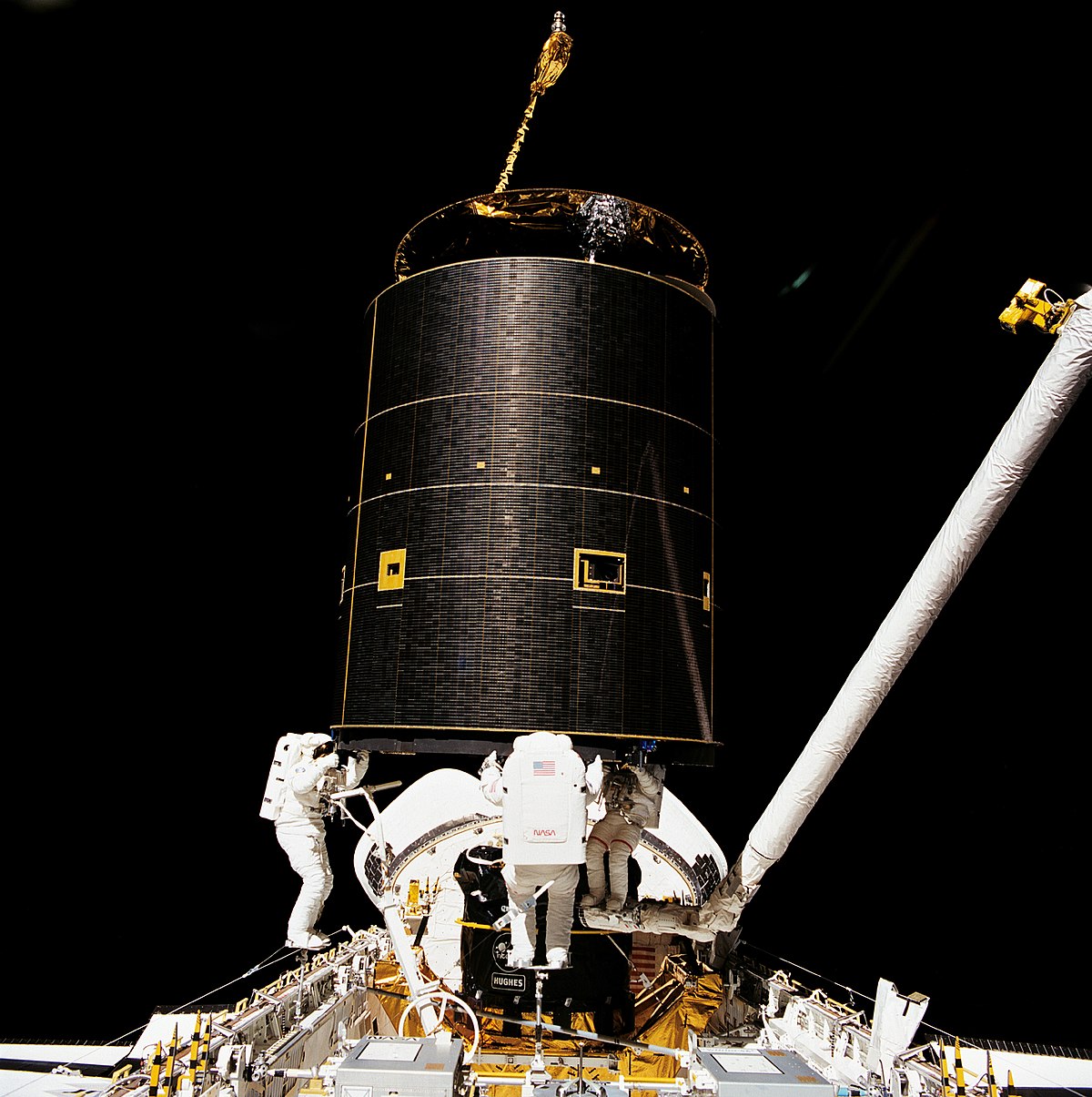
停泊の概念は、CBMの開発と並行して進化しました。ここに見られるのは、1992年のSTS-49のEVA3でのIntelsat603の6つの手による偶発的な「捕獲」です 1990年代初頭までに、CBMのより詳細な図が明らかになり始めました。PCBMの開発仕様の最初のリリースは2月、1992年CBM / PE ICDと月にACBM開発仕様、1993年のそれに続いて、1991年10月にあった高度な開発コンセプトのいくつかの要素が少しで保持されました変化する。ボルトの直径は0.625インチ(15.9 mm)に増加しましたが、ボルト/ナット構造ラッチと4バーキャプチャラッチは残りました。ボルトとキャプチャラッチの両方が電動化されており、手動バックアップが利用可能ですが、個々のメカニズムは、バルクヘッドを通過する密閉されたカップリングによって駆動されていました。「アクティブ」という用語は、嵌合操作が行われたときにすでに軌道上に存在していたインターフェースの側面にあるすべての受電装置のコロケーションを意味するように進化しました。
Advanced Developmentのコンセプト以降、その他の機能が大幅に変更されました。「両性具有」は廃棄されました。16本のボルトすべてがCBM / CBMインターフェースの同じ側に集められ、ナット側はもはや運転可能であるとは説明されていませんでした。8チャンネルの多重化モーターコントローラーは、ラッチ間でリモートで切り替えることができ、各モジュールに2つのコントローラーがACBMを備えています。潜在的な漏れ位置を監視するために差圧センサーが含まれていました。キャンセルされるまで、パッシブフレキシブルCBMにはまだアルミニウム製のベローズがありましたが、ケーブル/プーリーの概念は、多重化モーターコントローラーによって駆動される16本の動力付き支柱のセットに置き換えられていました。CBM / CBMシールの設計は、インターフェースの片側のみの「面」設計でした。アライメントガイドは展開可能で、向きを逆にして内側に向けました。4つのキャプチャラッチは摩擦クラッチを取得しており、バックドライブが可能です。
この時間枠で新機能が登場しました。ACBMのコンセプトにデブリカバーが追加されました。これは、単一部品の全径ユニットであり、取り外してRMSに交換しました。リングのバルクヘッドへの取り付けは64ボルトのパターンとして定義されていましたが、ボルトパターンの区別はどの情報源にも記載されCBM / CBMインターフェース平面に平行な荷重を運ぶために、せん断タイが設計に追加されました。
ISSへの移行(1993 – 1996年頃)

飛行したままのISSの機能は、宇宙ステーション再設計タスクフォースのオプションA-2で識別できます。
1990年12月までに、Space Station Freedomのコスト見積もりは1984年の見積もり80億ドルから上昇し、380億ドルに達しました。翌年の3月までに見積もりは300億ドルに減額されましたが、プログラムの再構築またはキャンセルの呼びかけは議会で顕著でした。1993年3月、NASAの管理者であるDan S. Goldinは、クリントン大統領が次のように望んでいることを伝えました。現在の目標の多くを達成しながら、利用コストを削減します…」
再設計チームは、1993年6月に、3つの異なる宇宙ステーションの概念を説明する最終報告書を提出しました。各概念は、28.5度と51.6度の軌道傾斜角で評価され、それぞれ米国とロシアの発射施設からの支援の問題を明らかにしました。3つの構成のいずれも、現在存在するISSの設計と正確に一致するものではありませんが、最終的な構成と非常によく似ているものもCBMは、すべての傾向ですべてのオプションに含まれる唯一の明示的に識別された構造/機械サブシステムでした。EVA時間を短縮するために、すべてのオプションでユーティリティ接続の前庭ボリュームの活用を増やすことが推奨されました。自動化されたコントローラー、モーター、およびラッチメカニズムの削除は、それらの1つのオプションとして概念的に識別されました。
タスクフォースから生まれた特定の概念設計は、すぐにイベントによって克服されました。1994年後半までに、米国、ロシア、および国際パートナーは、原則として、国内の取り組みを単一の「国際(原文のまま)宇宙ステーション」プロジェクトに統合することに合意した。この協力により、STS-74のオービタードッキングシステムの上にドッキングモジュールを設置するなど、ハイブリッド化された組み立て作業が可能になりました。停泊とドッキングの間のこのぼやけた一般的な区別は、RMSによって配置されますが、オービタースラスターの発射によって作動します。
両方のCBM仕様は、移行プロセスの一環として1995年(PCBM)と1996年(ACBM)に完全に書き直されました。この期間には、リビジョンD(1996年6月)でICDが専用のパート1(インターフェイス要件)とパート2(物理的および機能的定義)に分割されました。 1996年12月に国際的な取り組みの最終的な枠組みが契約上確立されるまでに、最初のCBMシミュレーターはすでにNASAに納入されていた。
資格(1994年頃– 1998年)
個別に指定されているため、ACBMとPCBMのほとんどの要件への準拠が個別に検証されました。 ACBMおよびPCBMのアセンブリレベルのアクティビティに加えて、Capture Latch、Powered Bolt、Powered Bolt Nut、Ready to LatchIndicatorなどのサブアセンブリのコンプライアンスデータが生成されました。たとえば、動力付きボルトとナットの機能は、周囲機能、ランダム振動、熱真空、およびボルトの場合は熱サイクルを含むコンポーネントレベルのテストによって認定されました。動的条件と同様に、降伏および極限静的条件での負荷テストがコンポーネントレベルで実施されました。これらのテストの成功基準は、一般に、予圧を確立して緩和するために必要なトルク、電気的導通、およびボルトのロードセルの精度に基づいていました。
対照的に、少なくとも11の特定の検証活動では、双方の交配および/または死亡の共同検証が必要でした。それらのうち、5つは、状況とインターフェースの特定の組み合わせを必要とするテストおよび/またはデモンストレーションによって検証された分析を求めた。たとえば、仕様では、キャプチャを「… SRMSおよびSSRMSによって課せられる動的負荷の下での分析によって… ACBMおよびPCBMの温度と圧力に起因するパフォーマンスの変動を含むアセンブリレベルのテストによって検証され、それらのインターフェース構造について。」 ACBM / PCBMインターフェースのボルトアップ分析、およびその後のリークには、圧力と温度の歪み効果を含む要素レベルおよびアセンブリレベルのテストによる同様の検証が必要でした。「…機械的機能…すぐに使える表示とキャプチャの達成を中断することなく」を検証するために、アセンブリレベルでエンドツーエンドのデモンストレーションも必要でした。
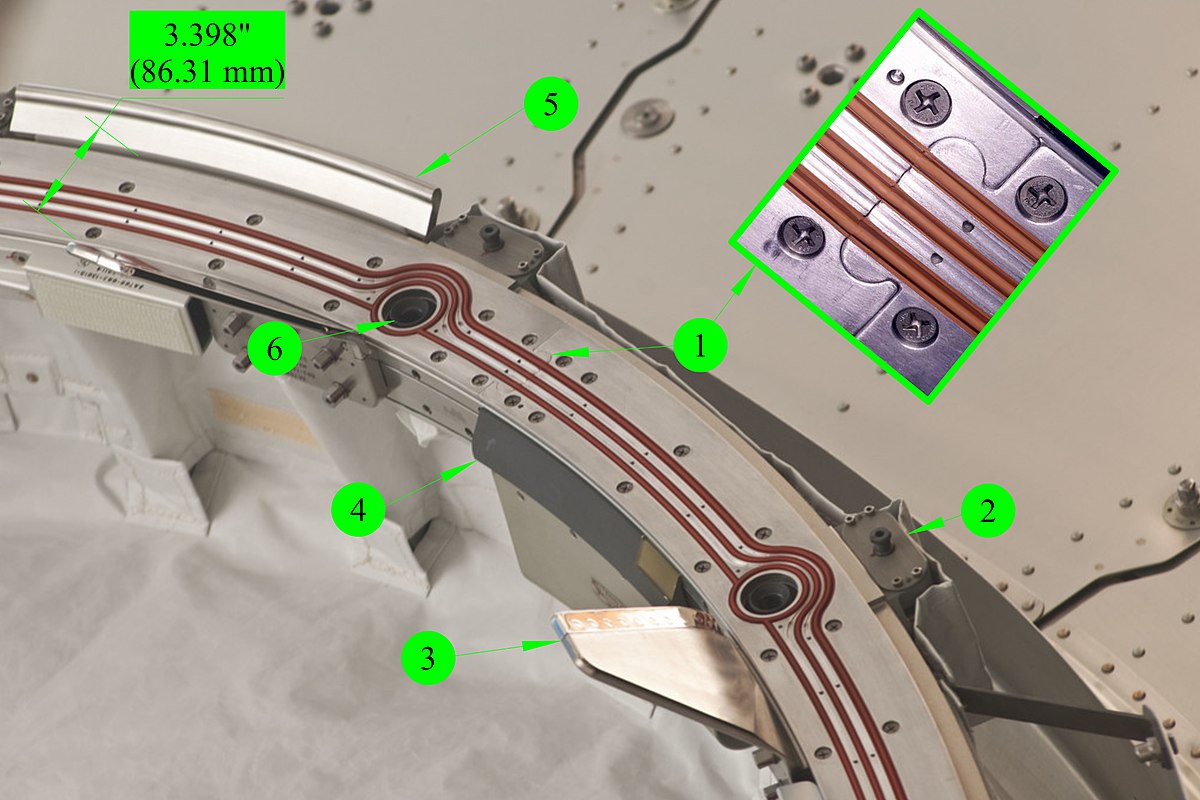
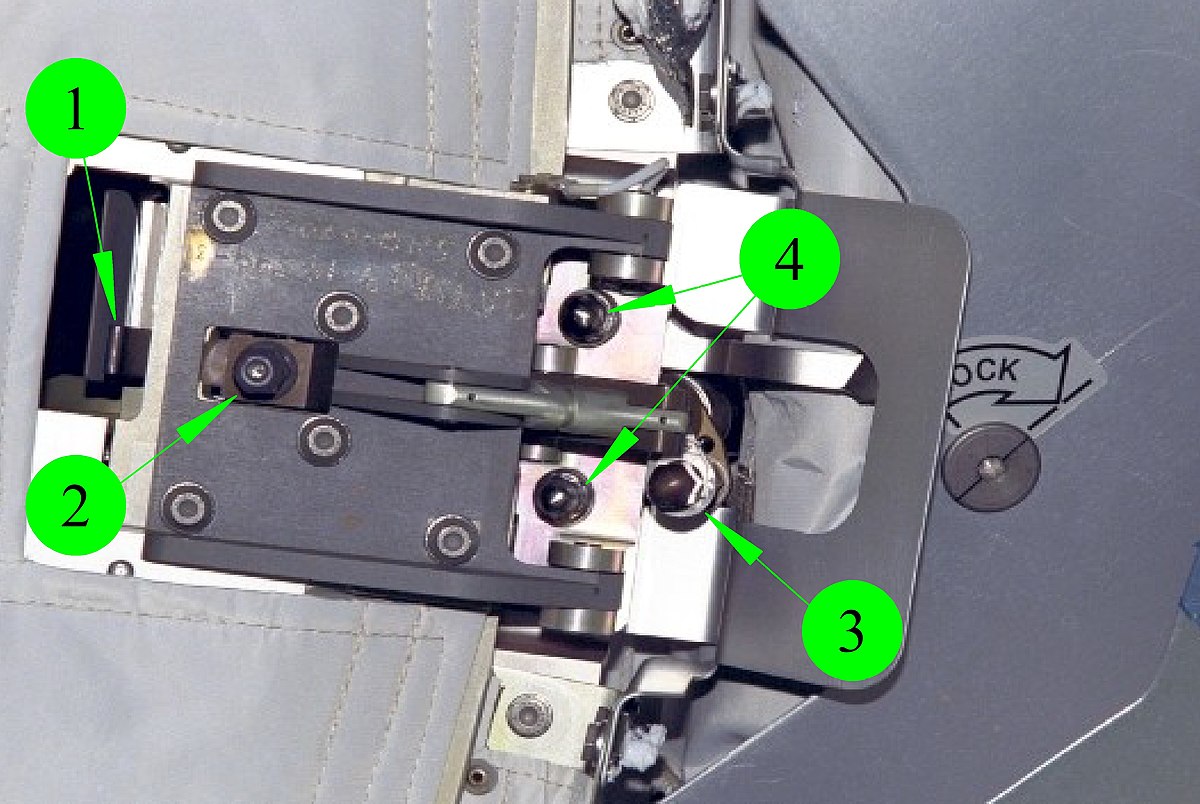
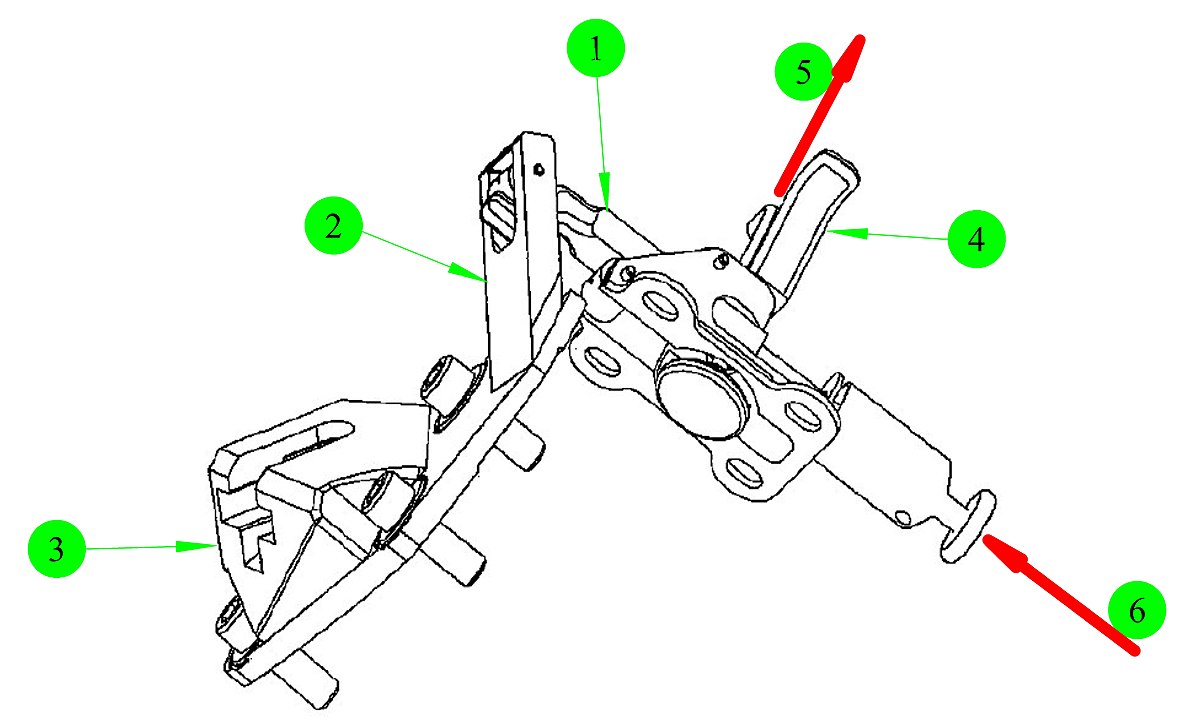
1993年のステーションの再設計では、CBMの設計変更はほとんど宣伝されていませんでしたが、サーマルスタンドオフとストライクプレート(1)、Ready-to-Latch(RTL)インジケーター(2)、IVAのカバーなど、サーマルバランステストの時点でいくつか導入されていました。シールランド(3)、外部アクチュエータ(4)、位置合わせピンとソケット(5)、および専用コントローラ(6)。RTL、アライメントガイド(7)、およびキャプチャラッチ(8)は、まだフライト構成に達していませんでした。
キャプチャのダイナミクスと歪みの複合効果を課すには、各側面の分析と検証テストを繰り返す必要がありました。専用のテストセットアップは、3つの並列スレッドで開発されました。
初期のCBMバージョンのコンタクトダイナミクス分析は1992年までに開始され、ボーイングのCBMモデル開発テストで使用するためにMSFCのRMSモデルに組み込まれました。このモデルは、「ソフト拘束の方法」に基づいており、「…対応するサーフェス間の交差または侵入を評価し、侵入の深さに比例する相互に垂直な力を計算します」。これらの「リバウンド」力とその後の加速に関する予備的なモデル検証テストは、1992年から少なくとも1997年までMSFCのContact Dynamics Laboratoryで実施されました。負荷は局所的に線形化され、共同テストでPCBMテスト記事のバックエンドに課されました。 MSFCのV20真空チャンバーの上部から吊り下げられたカウンターバランスの「抵抗負荷システム」によるデモンストレーション。
温度予測は、標準的な熱分析モデリング手法に基づいています。このモデルは、1995/96年にAEDCの12V熱真空/ソーラーシミュレーションチャンバーで両方のアセンブリのスタンドアロンサーマルバランステストによって検証されました。これらにより、正しいインターフェースコンダクタンス、内部再放射、および内部熱容量を確実に使用できます。検証は、選択された接触コンダクタンステストによってサポートされ、サーマルバランスで解決される変数の数を減らしました。ストリップヒーター、極低温シュラウド、および直接LN 2注入の組み合わせにより、アセンブリレベルの認定テスト中に温度が課されました。
加圧要素の圧力によるたわみは、一次圧力シェルの有限要素モデリングによって推定され、1996年半ばに圧力テストが検証されました。CBMアセンブリレベルのテストでは、16フィート(4.9 m)のアクティブ圧力容器(APV)が、飛行のようなラジアルポートバースプレートの境界条件をエミュレートしました。エミュレーションでは、厚さが0.125〜1.00インチ(3.2〜25.4 mm)の範囲の32個の外部構造ダブラー、32個の内部支柱、および16個の空気圧アクチュエータを使用して、剛性を調整し、たわみを抑制し、局所的なラジアル荷重を適用しました。より単純な9フィート(2.7 m)のパッシブ圧力容器は、アキシャルポートをエミュレートしました。APVの製造は、ノード1のラジアルバースプレートの設計における負のマージンの発見と重複していました。プレートの再設計は、APVの製造スケジュールに対応できませんでした。これは、テスト中のナット取得コマンドの相対回転によって補正されました。

報告されているCBM操作の認定温度範囲
は、日光、地球、および深宇宙の背景への曝露によって強く影響されます。
組み立てレベルのテストのセットアップは、1996年8月にチャンバーを変更することから始まり、2つの圧力容器が12月に特性テストのために納入されました。V20チャンバーで組み立てられたセットアップの統合チェックアウトは、1997年8月に開発中のCBMハードウェアのベースラインテストから始まり、その年の11月に完了しました。正式なテストは、1998年2月から9月までの3つのフェーズで実行されました。
フェーズAは、リーク率と電動ボルト/ナットのライフサイクルを評価するために、さまざまな大気および温度条件下で62回のボルトアップサイクルを実行しました。
フェーズBは、拡張された温度条件の下で35回の部分サイクル(キャプチャとナットの取得)を実行しました。
フェーズCは、「チャレンジ」条件下で5回のラウンドトリップデモンストレーションを実施しました。極端な温度差と、以前にハードウェアで実行されたものよりも離れたPCBM位置を組み合わせたものです。
このテストでリークテストが失敗したことはありません。接触ダイナミクスモデルは、高い統計的信頼性でテスト結果と相関し、たわみに対して識別可能な感度がないことが示されました。Powered Boltの摩耗の兆候が特定および検証され、いくつかの統合の問題が特定され、マイナーな再設計によって解決されました。重力効果のテスト固有のオフロードに関する重大な問題が発生し、最終的には飛行手順の変更につながりました。名目および不測の事態の手順が調査され、場合によっては、飛行操作の前に大幅に改訂されました。
その後、施設でテストが実施され、IVAシールが認定され、ボルトの到達、位置合わせのための連絡通路、RTLクリアランス、M / Dカバークリアランス、およびRTLアクティベーションに関するミッション運用の問題の解決がサポートされました。この施設はまた、軌道上でISSを組み立てるためのCBMの最初の3回の飛行使用をリアルタイムでサポートしました。
フィールドの変更(2000年頃-現在)

ノード3の未実装のアキシャルACBMの保護カバー構成は、その場所に固有のものです。
当初計画されていた天底向きの向きではなく、ノード1の港に面したCBMにノード3を設置するという決定は、「…独特の状況:露出した軸方向の港の停泊メカニズム。これは計画されていなかったためです。というのも、露出した領域をカバーする展開可能なシールドを提供するために、前向きのラジアルポートと同様の新しい設計が開発されたからです。」ユニークなカバーは、第50次長期滞在のEVA#4の間に設置されました。
2017年の終わりから2018年の初めに、2つの天底に面した港のハッチビームへのCPAの取り付けに変更が加えられました。これらの変更により、CPAのローテーションが可能になりました。「…車両の到着後に乗組員がCPAを完全に取り外す必要はなく、前庭に移動できます。これにより、停泊中の乗組員の時間と収納スペースの両方を節約できます。適切なCBMを実現するには、CPAを設置する必要が停泊中の操作ですが、ハッチが開くと車両への通路が妨げられるため、貨物操作の前に廊下から移動する必要が」
ギャラリー編集
設計
モジュールパターン構成の調査は、高度な開発フェーズの間も継続されました。ここに示されている三角形の四面体パターンなど、いくつかのオプションの準球形ノードは、CBM開発に対して大幅に異なる影響を及ぼします。スミスらを参照してal。(2020)ラジアルポート(およびCBM)が圧力シェルの設計によってどのように影響を受けるかについての議論については§V。

ISSのノード1「ユニティ」の圧力を含む一次構造の主要な要素。PCBMが存在しない場合、ACBMリングはバースプレート(バルクヘッド)の外部フランジとして機能します。Zipay他を参照してal。(2012)圧力シェルの広範な議論のため。

CBMのサイズは放射状の向きと相互作用して、このアーティストのレンダリングにたわみを生成します。このアーティストのレンダリングでは、ACBMの「外側」フランジでわかりやすく示していますが、これらのたわみは、ACBMのリングが加圧要素にボルトで固定されている場合(リングが取り付けられている場合)に実際に適用されます。CBMの2つの半分が「ハードメイト」でボルトで固定されると、それらは「適合」します。
前庭は、フランジ付きバルクヘッド(3)に取り付けられたACBMリング(1)と、フランジ付きバルクヘッドまたはバレルセクション(4)に取り付けられたPCBMリング(2)で構成されています。両方とも2219アルミニウム鍛造品から機械加工されたリングは、「成形シール」(5)で嵌合します。各リングは、同心のOリング(6)のペアによって内側の端がシールされています。ここに示すように、パワードボルトの位置の間の「ミッドスパン」では、大気圧(F a)(15.2 psia)、シール圧縮(F s)、フランジ適合性(F c)の3つの内部荷重がジョイントをこじ開けようとします。このアーティストによる一般的な断面のレンダリングは、空気が空間の真空に漏れる可能性がある場所も(青色で)示しています。

CBM / CBMジョイントは、16本の等間隔の電動ボルト(1)でクランプされています。細目ねじ付きボルトシャフトは、公称直径0.625インチ(15.9 mm)のインコネル718から機械加工されています。各ボルトは、ナットプレート(2)でカプセル化されたナットにねじ込まれます。ナットがで作られてNitronic 60内部インビトロルーブNPI-1220Cで潤滑鋼、。ボルトは、最大持続出力が1,600lb⋅in(180,000mN⋅m)のアクチュエータ(3)からのトルク(τ)によって作動する19,300 lbf(85,900 N)の予圧(F p *)に適合しました。 )。有効な予荷重は、ボルトとフランジの熱膨張係数の違いにより、停泊後に変化する可能性があります(F cte)。各ボルトは、バネ仕掛けのサーマルスタンドオフ(4)の分離荷重(F t)と整列します。これも、バース後の温度の影響を受けます。このアーティストによる一般的な断面のレンダリングでは、ボルトの位置に固有のリークパスも(青色で)示されています。
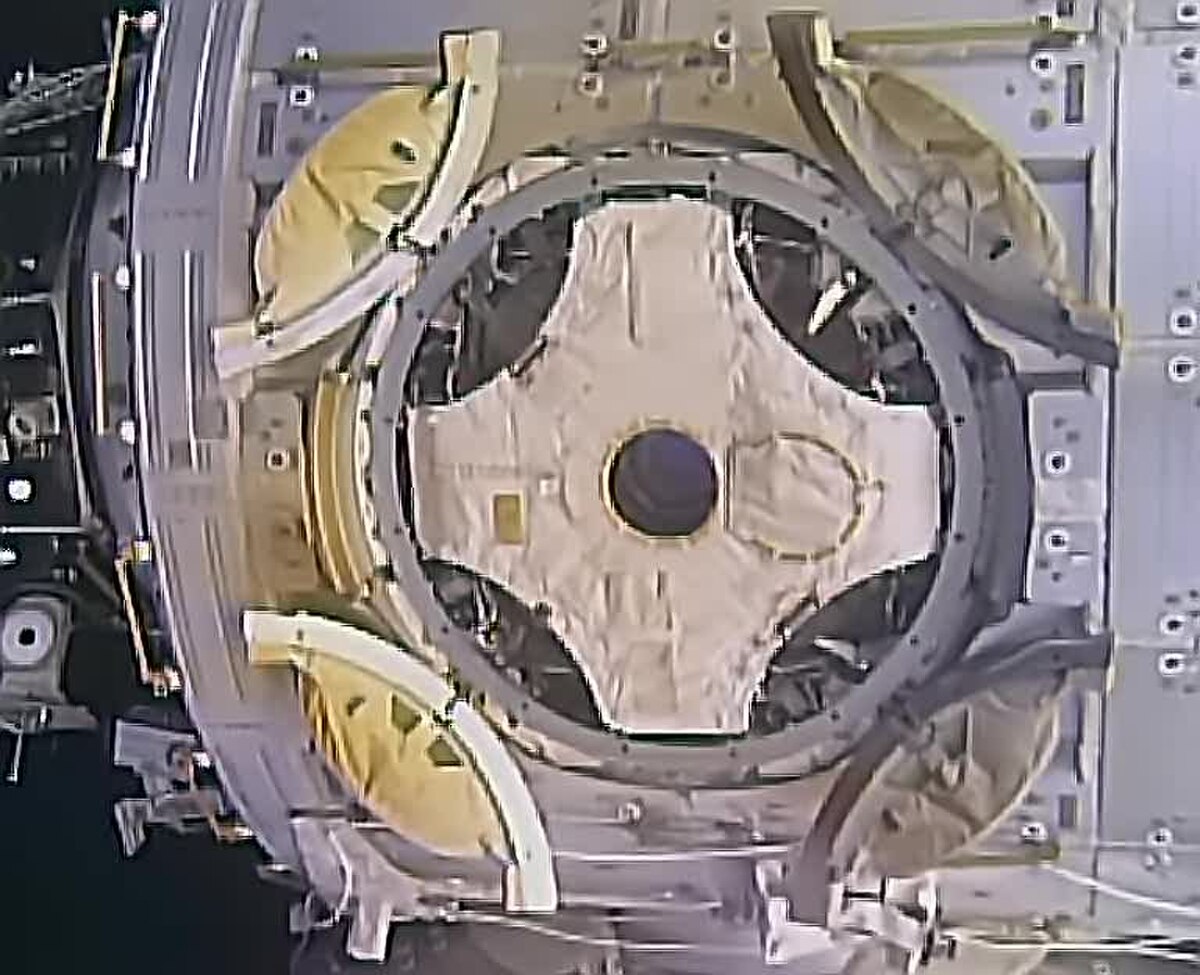
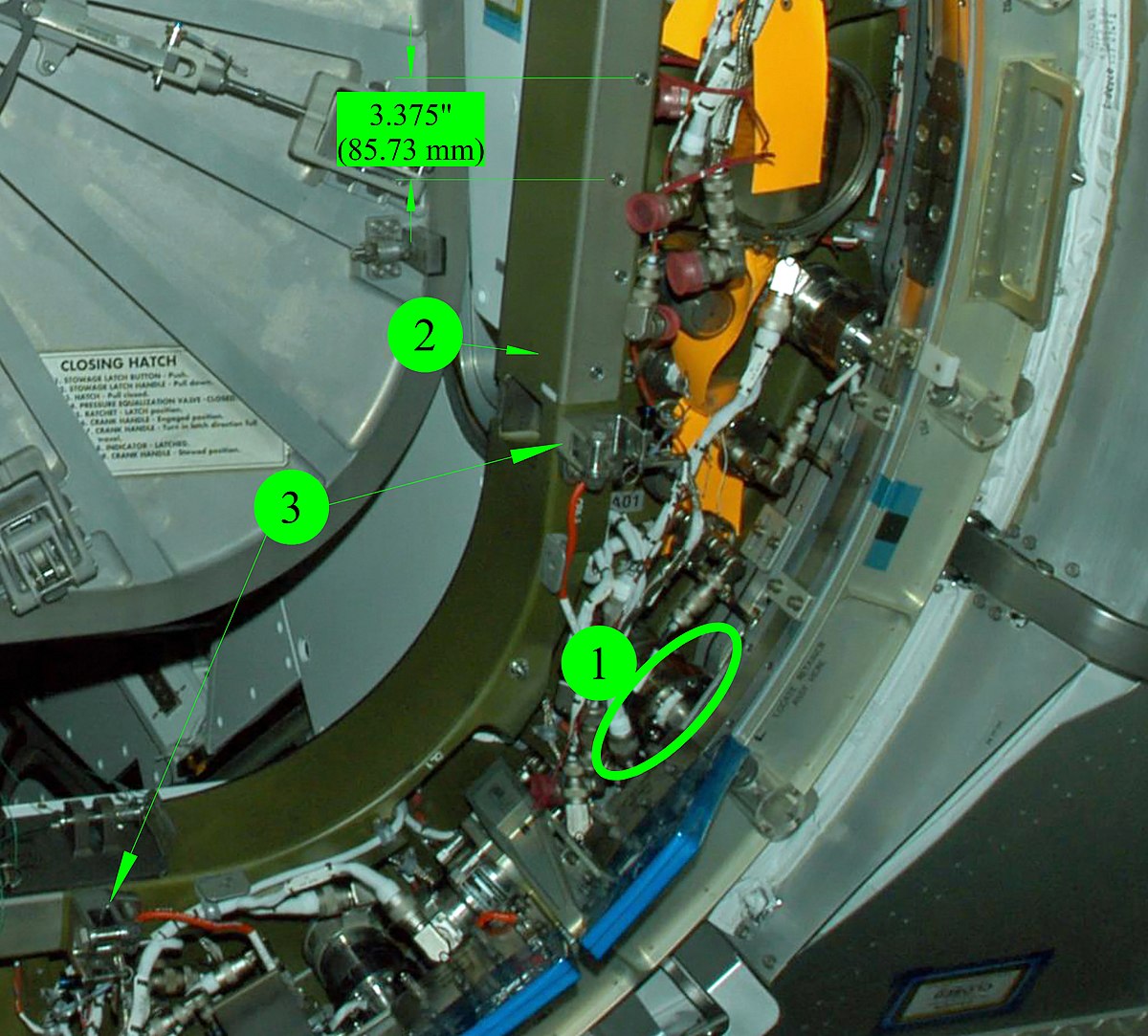
STS-092の間に撮影された剥ぎ取られた前庭。電動ボルトナットとそのIVAシールキャップ用に予約された領域が表示され(1)、CPM / PEリークチェックポート(2)とCBM / CBM接地ストラップ(3)も表示されます。これは、2つのノード1アキシャルポートの1つです。閉店ブラケット(4)は、ハッチビームの面ではなく、ハッチビームに押し込まれています。「バターディッシュ」IVAシールは、動力付きボルトを覆い、カバーは、船外フランジの内面にあるCBM / CBM IVAシールランド(6)を保護します。カバー用のマウント(7)とテンショナー(8)も示されています。

嵌合したCBMリングのほぼ完全な象限が、PMA2につながる前庭に見られ、それらの間のGask-o-seal(1)の厚さを示しています。リングは16個のナット(2)でしっかりと結合されており、それぞれが電動ボルトによってねじ込まれ、嵌合したモジュール間で軸方向および曲げ荷重を伝達します。ボルトのうち、アクチュエータ(3)のみが表示されます。また、キャプチャラッチ(4)、キャプチャフィッティング(5)、いくつかの電気/制御ハーネス、および象限の嵌合アライメントガイドの補足も見られます。

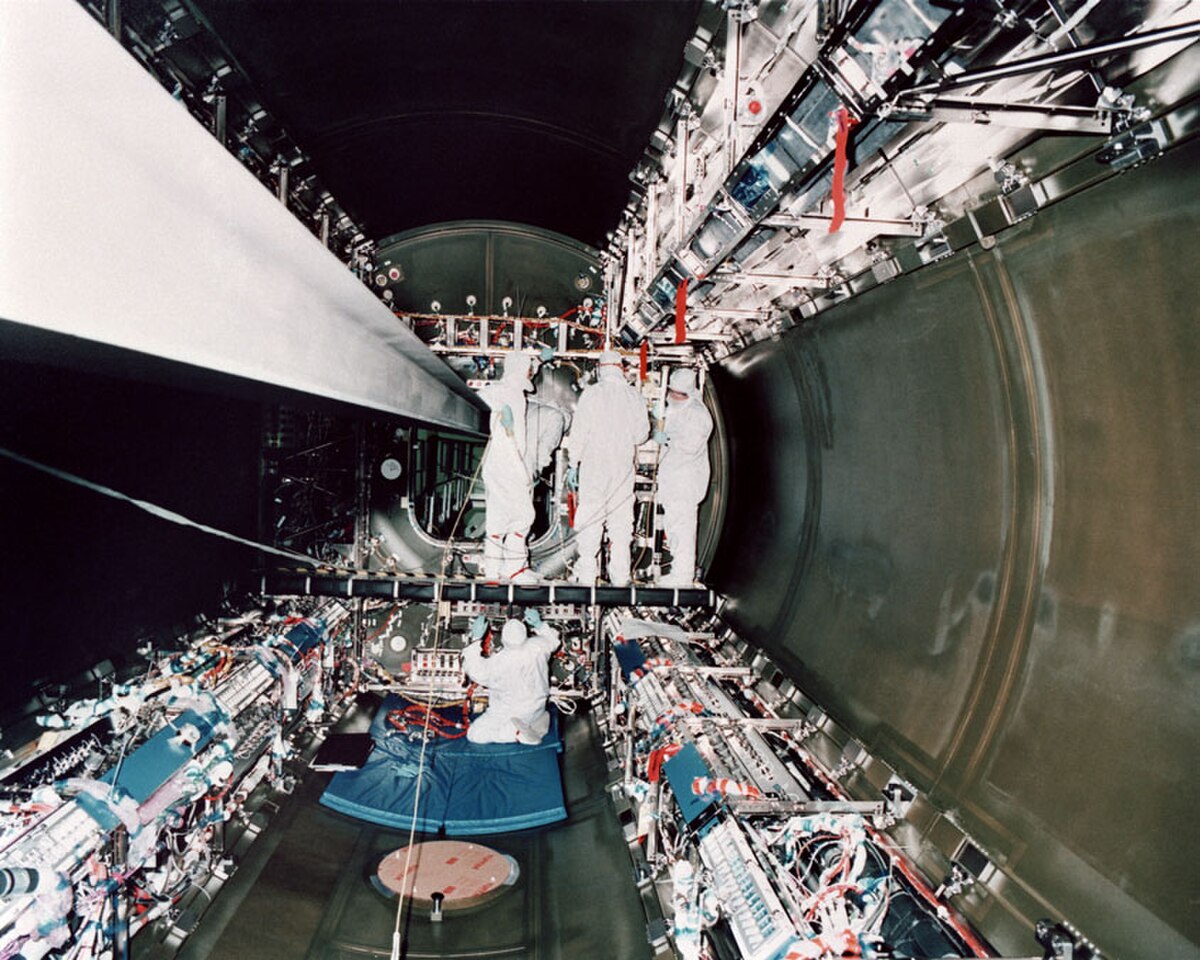
最初のシステムラックをUSラボ「Destiny」に挿入すると、Hopson、Aaron&Grant(1990)で説明されているアーキテクチャのアプローチに従って、共通ハッチとCBMの両方のサイジングロジックが実証されました。この写真が1998年3月に撮影されたとき、ACBMリングはまだ取り付けられていませんでした。
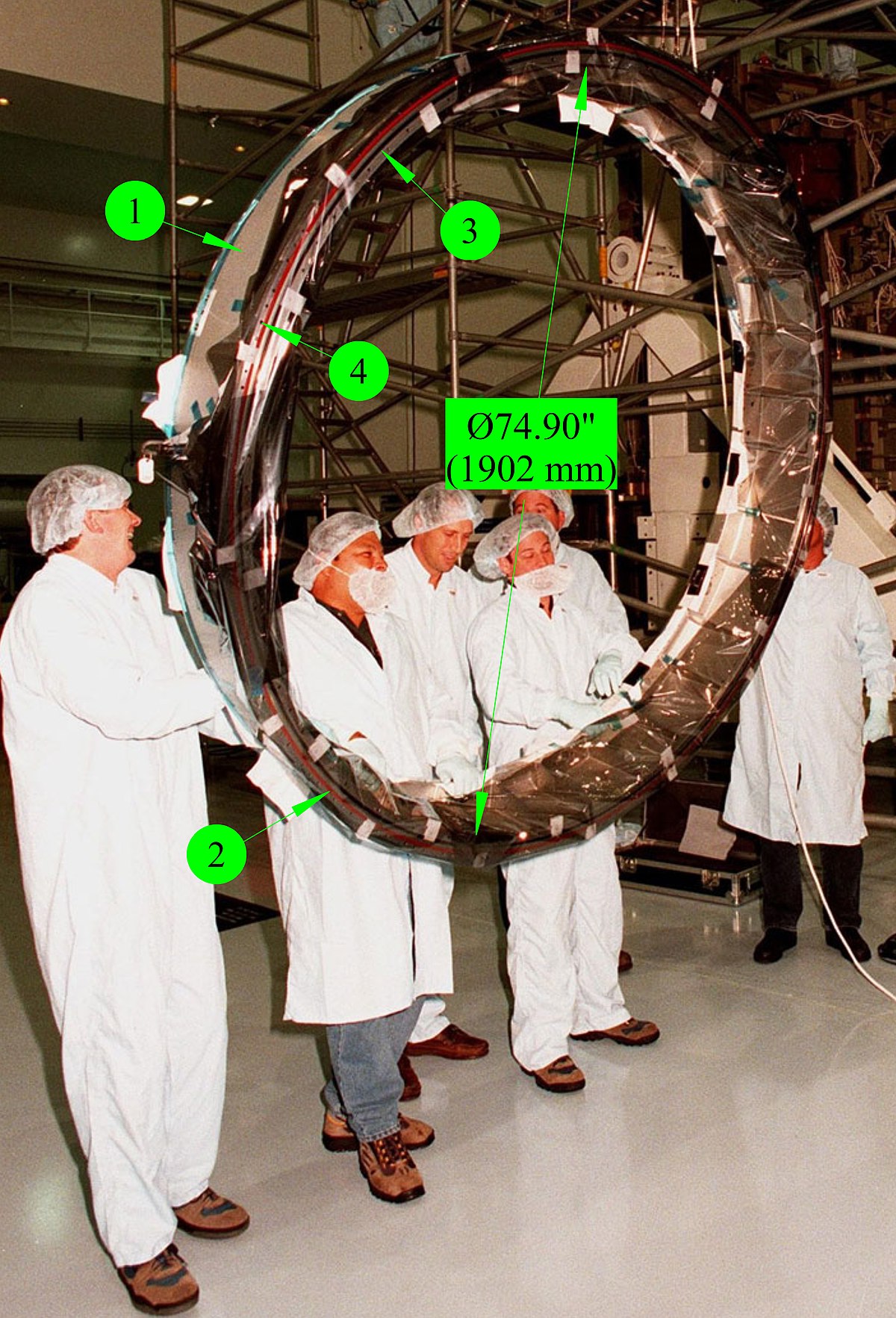
ACBM構造リング(1)はバルクヘッドフランジ(2)にボルトで固定されます。96ボルトの外側のパターンは、PCBMリングのパターンと同じです。1998年11月に米国の「Destiny」ラボのこの写真が撮影されたとき、外部の断熱材とシールドはまだ設置されていませんでした。
船内フランジのIDは、2004年の組み立て中にノード2で強調表示された(1)ように、16箇所で「スカラップ」されています。IDパターンには112個のボルトがあり、そのジョイントには合計208個の留め具がハッチビーム(2)は、コントローラーパネルアセンブリ(CPA)の取り付け穴を示し、M / Dセンターセクションスタンドオフブラケット(3)が取り付けられています。フランジカバーは飛行前に取り外します。

ACBMのIDスカラップ(1)は、アクチュエーターが取り外されたこのトレーニングモックアップでよりよく見えます。ジョイントの両側は、不測の事態に備えてIVAシールに対応できるように形作られています。
1998年に設置される前のZ1PCBMリング(1)。ここでPE側から見ると、シリコン(2)とフルオロカーボン(3)のOリングはすでに船内フランジの下に取り付けられています。取り付けボルト穴(4)が内側フランジの周りに見え、インデックスピンが突き出て、シールが所定の位置にボルトで固定されるときにシールが均一に圧縮されるようにします。

2000年の初めにここで見られたように、Z1 PCBMリング(1)は、内側と外側の961/4インチのボルトによってドームに取り付けられています。バンパー(2)、サーマルスタンドオフ(3)、アライメントソケット(4)、アライメントガイド(5)も取り付けられています。
2つのCBM側の間のシールは、4セグメント、両面成形設計です。36本のボルトでPCBMリングに取り付けられた、各セグメントのアルミニウム基板の厚さは0.250インチ(6.4 mm)です。高さが0.044インチ(1.1 mm)(内側のビード)から0.050インチ(1.3 mm)(外側)の範囲で、3つのビーズが各セグメントに成形されています。STS-124の期間中、円周の1/8強がここに表示されます。挿入図では、セグメント「インターロック」ジョイント(1)が強調表示されています。写真には、2つのサーマルスタンドオフ(2)、位置合わせガイド(3)、キャプチャフィッティング(4)、バンパー(5)、および2つの電動ボルトナット(6)の端も示されています。シールビード間の小さな穴とくぼんだチャネルにより、一度嵌合したCBM / CBMジョイントのリークテストが可能になります。

STS-124からのKiboのACBMのこの写真には、3段階の位置合わせが見られます。「高い壁」を越えて湾曲しているバンパー(1)は、放射状のポートにのみすべてのACBMインストールには、位置合わせガイド(2)と位置合わせピン(3)が着信モジュールがRMSとともに移動される間、制約は各ステージから後続ステージに渡されます。キャプチャ中にピンがそれぞれのPCBMソケットに収まると、最終的な位置合わせが行われます。その後、それらは境界面全体にせん断荷重とねじり荷重を伝達します。

パワードボルト(1)の先端は、STS-124の間にKiboのラジアルポートの外側フランジから覗きます。キャプチャラッチ(2)は、「キャプチャ準備完了」またはその近くにその先端はここのフランジから5インチ以上上にありますが、スイープ中にさらに到達します。Ready-to-Latchインジケーター(3)は、RMS操作中にPCBMのアライメントガイドによって押されます。
閉位置でのキャプチャラッチ(1)の正面図と側面図。Ready-to-Latchインジケーター(2)の下側には、キャプチャ中にPCBMアライメントガイドによって圧縮される1セットのスプリングが表示されます。ケーブル(3)は、ラッチとそのリミットスイッチ、RTL、および近くの電動ボルト用です。

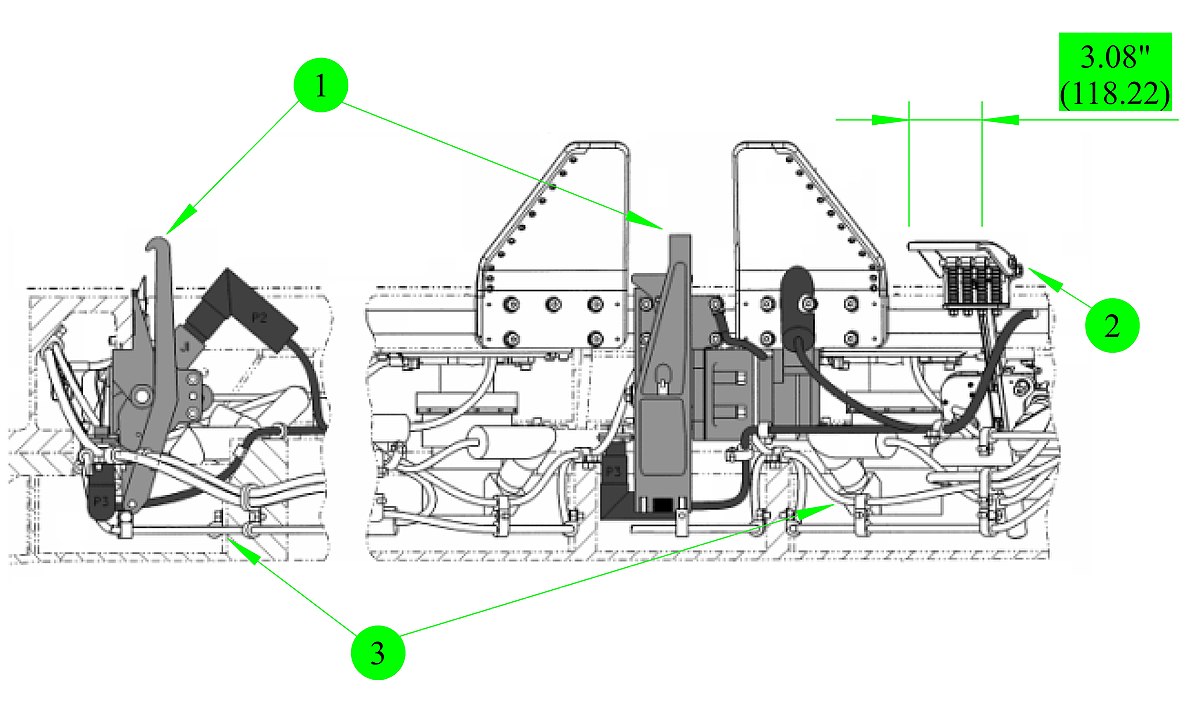
キャプチャラッチは、回転する4バーリンケージです。シャーシ(1)に取り付けられたアクチュエータ(図示せず)は、ドライブアクスル(2)にトルクを加え、ドライブアーム(3)を回転させます。アームが「ドッグレッグアセンブリ」(4)を押して、キャプチャアーム(5)の外側のクレビスにトルクをかけます。キャプチャアームはフォロアリンケージ(6)の端を中心に回転し、もう一方の端は車軸を中心に回転します。展開すると、ラッチがスイッチをトリップします(図には示されていません)。完全に閉じると、キャプチャアームの穴(8)を通過するフック(7)によってロックされます。

ACBMのReady-to-Latch(RTL)インジケーターはバネ仕掛けのデバイスであり、PCBMアライメントガイドによって回転とプランジを組み合わせて押し下げます。ACBMコントローラーパネルアセンブリを介してRMSオペレーターに信号を送信します。バネ仕掛けの2つの自由度はそれぞれ、メンテナンスのためにロックアウトできます。1つのRTLが各キャプチャラッチに関連付けられています。
内部に配置されたキャプチャコンポーネントは、ここでは中間のキャプチャ位置に示されています。Ready-to-Latchインジケーターはすでに急降下していますが、PCBMアライメントガイドではまだ回転しこのフレームは、JSCで作成されたリアルタイムの接触ダイナミクスシミュレーションから取得されました。

パワードボルトの上部ハウジングは、2008年後半からのキューポラのこの飛行前テストで示されています。アクチュエータはこの装置では使用されサーマルスタンドオフ(2)を備えたストライクプレート(1)とソケット(4)を備えた位置合わせピン(3)の係合が差し迫っています。挿入図は、2年後に撮影された写真からのもので、電動ボルトアセンブリの上部ハウジングの背面を示しています。
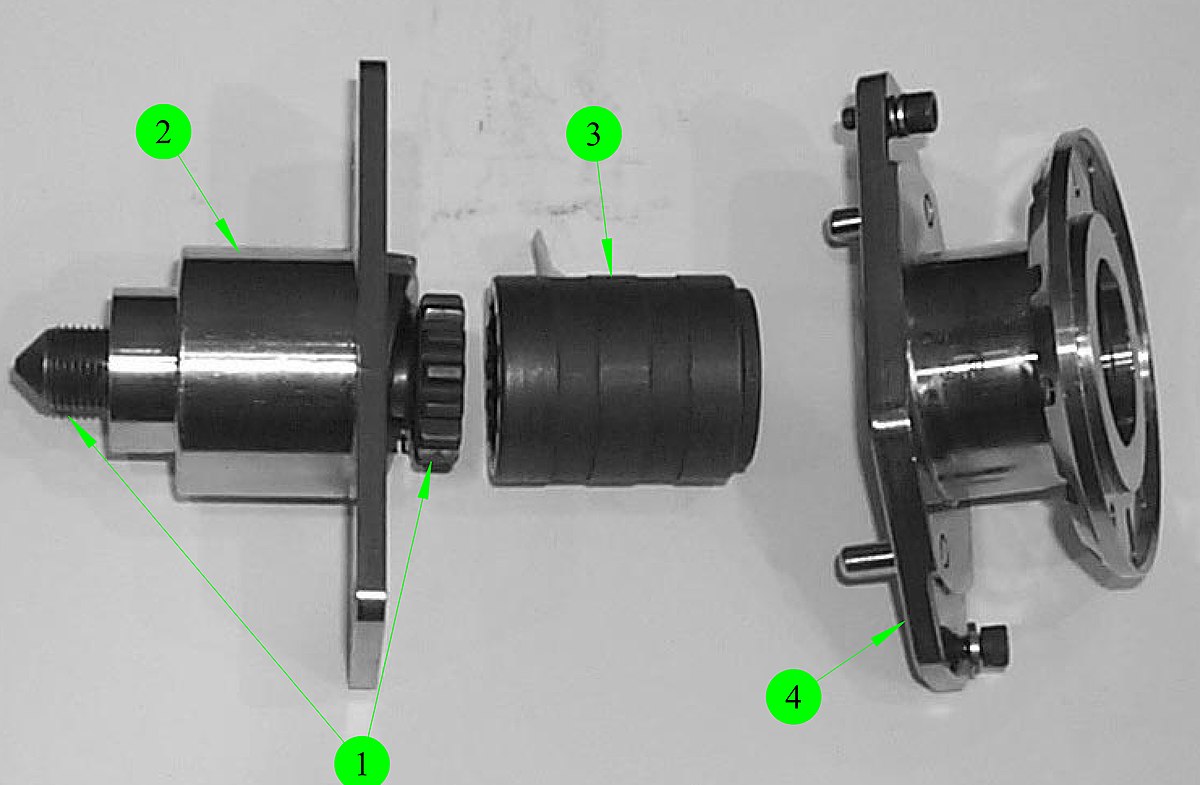
部分的に分解されたCBMパワードボルト。シャフトの両端(1)、ACBMリングに寄り添う下部ハウジング(2)、ドライブスリーブ(3)とシャフトとのスプラインインターフェース、および上部ハウジング( 4)。上部ハウジングとドライブスリーブは、前庭を壊さずに取り外して、IVAシールの「バターディッシュ」の下にスプラインロックを取り付けることができます。スプラインロックはボルトが外れるのを防ぎます。

各電動ボルトは、カプセル化されたナット(1)を「取得」して、ねじ山を位置合わせします。これは、ナットプレート(4)の下のワッシャー(3)の間に保持されているスプリング(2)によってロードされます。プレートは、PCBMの外側フランジの背面に1対のノックピン(5)によって配置されています。ボルトが取得中にナットを少しずつ動かすと、ナットの動きは、プレートの長方形の穴の内側にあるフローティングワッシャー(6)のタブと球形ワッシャー(7)によって制限されます。割りピン(9)でロックされた城郭ナット(8)は、スタックを一緒に保持します。一対のキャプティブファスナー(10)によってフランジに取り付けられます。カプセル化されたナットにパワードボルトが詰まっている場合は、分解することで、前庭を減圧することなく、押収されたユニットをACBM側から取り外して交換することができます。

2001年のSTS-102中にハッチビームにボルトで固定された4つのコントローラーパネルアセンブリ(CPA)の1つ。各CPAには、1つのキャプチャラッチコントローラー(1)、4つのパワードボルトコントローラー(2)、および入力電力を調整する回路(3)がM / D「中央セクション」カバーを取り付けるためのブラケット(4)は、CPAの両側に表示されます。写真は、ACBMを振り返りながら、結合した前庭のPCBM側から撮影したものです。基本的な個別のコントローラー設計は、二酸化炭素除去アセンブリのポンプファンモーターコントローラー、ベントおよびリリーフバルブ、および内部熱制御システムバルブにも使用されます。

6人のメンバーからなる第59次長期滞在クルーは、ノード1(ユニティ)とノースロップグラマンのシグナス商業宇宙貨物船の間の前庭を眺める肖像画のポーズをとります。見切りは、ローテーションされたCPAの完全な補完をカバーします。

各アクティブCBMには、4つのコントローラパネルアセンブリが5つのACBMを使用して、ノード3は20のそのようなユニットを軌道に乗せました。ここでアキシャルACBMに見られるように(1)CPAはハッチを横切って片持ちになっています。2009年にKSCで撮影されたこの写真では、M / D花びらがCPAに近接していることも、ラジアルポートで確認できます(2)。別のポート(3)には、すでにM / Dセンターセクションが装備されています。

大きなM / Dセンターセクション(1)は、ハッチの大部分を覆い、流星物質/破片環境からハッチを保護します。設置場所に応じて、いくつかのストラップと開口部がここでSTS-120の間に見られるように、ほとんどのカバーにはハッチウィンドウの上にフラップ(2)がフラップは、スナップで保持される「フックアンドループ」クロージャーによって拘束されます。4つのキャプチャラッチのそれぞれは、バネ仕掛けの展開可能な花びら(3)で覆われています。それらは、軌道上のメイトに影響を与えるメカニズムを明らかにするために開きます。

センターセクションの多層ファブリック(1)は、ターンバックル(3)によって張力がかけられ、その周囲の周りのプーリー(2)を通るケーブルによって吊り下げられています。リングに取り付けられたクレビス(4)に挿入されたプーリーは、各CPAの両側のブラケット(6)に適合するスタンドオフ(5)を引っ張ります。中央部分は乗組員によって下から取り外され、新しく停泊したモジュールが露出します。

ラジアルポートハッチの一角近くの密集したエリアは、飛行中のメンテナンスマニュアルからの図でここに見られます。パワードボルトロードセルのケーブル(1)は、上部ハウジング(2)とアクチュエーター(3)を包み込み、これらはネジ付きカラー(4)によって一緒に保持されます。CBM / CBM IVAシールの保護カバー(5)とカバーマウント(6)は、M / Dカバーセンターセクションの8つのクレビス(7)の1つと同様に、前景に展開可能なカバー発射ロックピンの拘束スロット(8)は、CBM / CBMインターフェース面を超えて突き出ています。

花びら(1)は、キャプチャラッチがローラーリンク(2)から解放されると、外側に展開します。ピボットポイント(3)は、キャプチャラッチのすぐ外側に各花びらは、クレビスの上のスロット(5)に収まる2つの発射ロック(4)、位置合わせガイドを収容するためのポケット(6)、およびそれぞれのラッチ準備完了インジケーター(8)と位置合わせされた機能(7)を備えています。
展開可能な花びらは、ローラーリンク(1)の先端にあるキャプチャラッチによってつかまれます。ボルト(2)を緩めることにより、EVA中にリンクを解放できます。バネ仕掛けのアクチュエータをボルト(3)で「ロックアウト」することで、宇宙飛行士は手動操作の前にメカニズムを「安全」にすることができます。花びらの構造は、2本のボルト(4)で展開メカニズムから分離できます。

ノード1「Unity」の最下点ポート上のPMA-3の位置は、停泊中のモジュールと展開されたM / D花びらの間の緊密な適合を示しています。
花びらは、M / Dセンターセクションクレビス(3)のフィッティング(2)に挿入されたピン(1)によって、発射のために所定の位置にロックされます。リリースは、ACBMから引き離される(5)Tハンドル(4)によって行われます。ピンをフィッティングに押し戻す(6)ことで、再度ロックできます。

花びらは通常、EVA中に、便利な場所にあるストラップを使用してロックを解除します。

PCBMの表面に取り付けられたCBM / CBMシールは、シャトルで発射されたときに破片から保護するために覆われていました。リングの面にボルトで固定されたシールは、画像の左上隅のカバーを超えて覗いています。就寝前のEVAによって取り外されたカバーは、ロジスティクスミッションには使用されません。

CBM / CBMジョイントには、一次シールが故障した場合に備えてIVAシールを取り付けるための規定がプライマリと同様に、セグメント化された成形シールですが、外側の面にのみビードがビーズは圧縮プレートによってリングの内側の面に押し付けられ、保護カバーを保持するために使用されるのと同じボルトパターンに固定されます。

ACBMが親モジュールにボルトで固定されているジョイントで漏れが発生した場合は、Oリングを内側に取り付けることができます。Oリングは、一連の圧縮プレートによって溝に圧縮されます。この特定のプレートは、ジョイントのスカラップに適合しています。

パッシブCBMは、親要素にボルトで固定されるIVAシールを提供します。ここで、人間の指(1)は、Oリングの上に取り付けられるメインIVAシール圧縮プレートを指しています。カバー(2)は、ジョイントのボルトヘッドの上に配置することもできます。各ボルトヘッドは、ジョイントを通る潜在的なリークパスです。

「バターディッシュ」カバーは、パワードボルトとパワードボルトナットを通る(およびその周囲の)漏れ経路をシールします。ACBMのボルトに使用する場合は、アクチュエータと上部ハウジングを取り外し、皿の内側にスプラインロックを取り付けて、周期的な負荷がかかったときにボルトが徐々に後退しないようにします。
オペレーション
この表示画面は、ISSのステージ3A(STS-92)への組み立て中にCBMの操作制御に使用されました。画像ソースには、使用可能な各停泊コマンドの詳細な説明が含まれており、報告可能な各ステータスメッセージを解釈します。

ノード1(ユニティ)とUSラボ(デスティニー)の間の前庭を装備している間に行われる接続。画像ソースには、艤装手順の詳細な説明が含まれています。
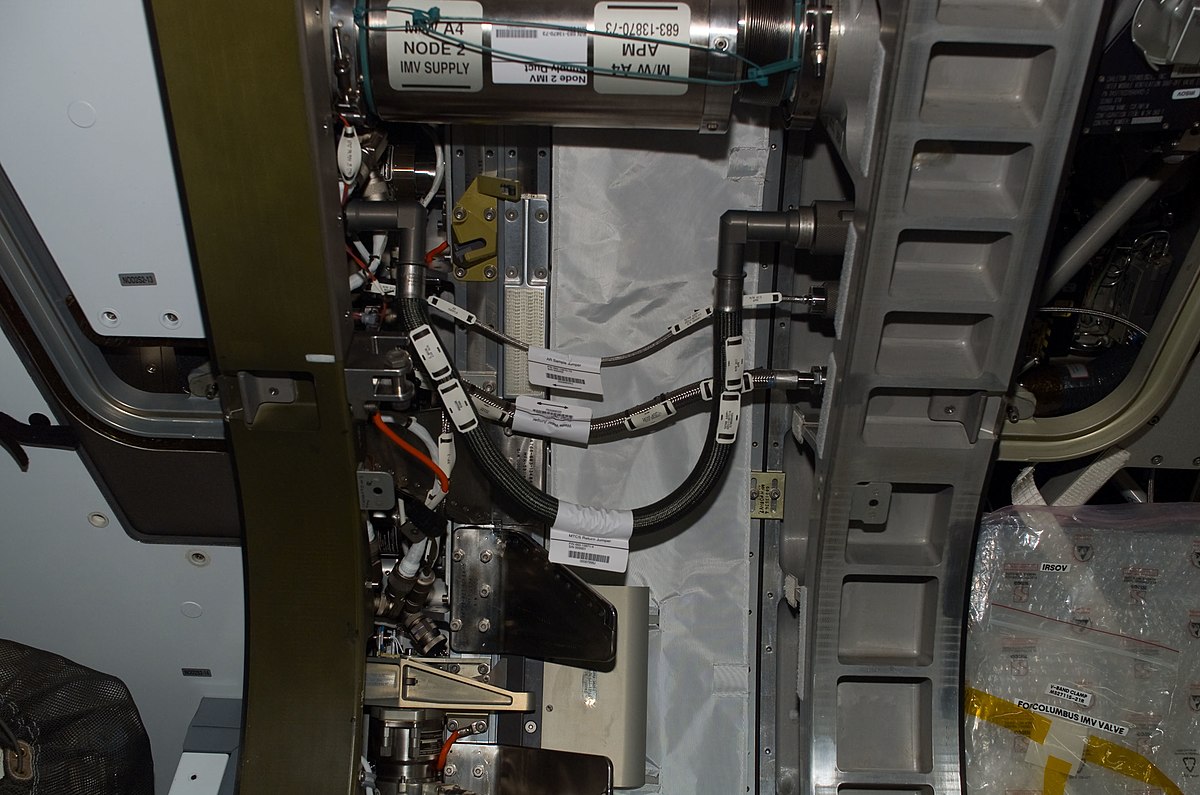
ここにノード2とコロンバスモジュールの間に示されているような前庭ジャンパーは、通常、向かい合った隔壁の適切に位置合わせされたコネクタの間にまたがっています。Link&Williams(2009)のルーティングに関する説明を参照して

ノード3が軌道に投入される直前にISSの設計が改訂されたため、ノード1と3の間の前庭のジャンパーは適切に配置されノード1のユーティリティは、ISS Expedition21の乗組員によってSTS-129とSTS-130の間で再ルーティングされました。Link&Williams(2009)の詳細な説明を参照して

ミハイル・チューリンのRosaviakosmos、遠征3フライトエンジニアは、Unityノード1上のハッチでコントローラーの電源アセンブリ(CPA)の接続を確保します。

第16次長期滞在の司令官であるペギーウィットソン宇宙飛行士は、国際宇宙ステーションのハーモニーノードとデスティニー研究所の間の前庭で働いています。

第47次長期滞在司令官のティムコプラと航空機関士のティムピークは、ノード1(ユニティ)からのシグナス貨物車両の停泊に備えて、前庭にM / Dカバーセンターセクションを組み込みます。

間もなく廃止される前庭に位置する第21次長期滞在飛行エンジニアのニコールストットは、CBMとコモンハッチの両方にスケール感を提供します。

2016年4月にTranquilityのリアポートに移動中のBEAM。

第5次長期滞在エンジニアのペギーA.ウィットソンは、完全装備の前庭を浮遊するための適切な形態を示しています。

CBMのサイズにより、ISSの構築により、モジュールの発売後までラックサイズのパッケージの設置を延期することができました。延期により、軌道傾斜角の変化に対するプログラムの調整が可能になり、シャトルのペイロード機能への影響に対応できました。
 メディアを再生する
メディアを再生する
SSRMSによるPMM「レオナルド」の移転。
 メディアを再生する
メディアを再生する
SSRMSは、自由飛行するCRS-12モジュールに取り組み、停泊するためにISSに移動します。
ミッション
CBMの用途(2020年5月現在)を以下に示します。PMA-1およびPMA-2のノード1へのファクトリメイトのタイミングは概算です。2015年4月までのバースについては、ISS(Utilization)(NASA / ISSP、2015)への参照を参照してPCBM要素の列に記載されているシャトルフライトの追加情報を利用できます。後のバースは、NASAの飛行状況レポートやその他のドキュメントの異常や関連情報と同様に、列で実証されています。
バース
PCBMエレメント
時間枠
目的
ACBMエレメント
オリエンテーション
ノート1 PMA-1
1998年9月
組み立て
ノード1
後部
ファクトリーメイト2 PMA-2
1998年9月
組み立て
ノード1
前方
ファクトリーメイト3 Z1
2000年10月
組み立て
ノード1
天頂4 PMA-3
2000年10月
組み立て
ノード1
天底5 PMA-2
2001年2月
組み立て
USラボ
前方 6 USラボ(Destiny)
2001年2月
組み立て
ノード1
前方7 PMA-3
2001年3月
組み立て
ノード1
ポート 8 MPLM(STS-102)
2001年3月
ロジスティクス
ノード1
天底 9 MPLM(STS-100)
2001年4月
ロジスティクス
ノード1
天底 10 エアロック(クエスト)
2001年6月
組み立て
ノード1
右舷 11 MPLM(STS-105)
2001年8月
ロジスティクス
ノード1
天底 12 MPLM(STS-108)
2001年12月
ロジスティクス
ノード1
天底 13 MPLM(STS-111)
2002年6月
ロジスティクス
ノード1
天底 14 MPLM(STS-114)
2005年7月
ロジスティクス
ノード1
天底 15 MPLM(STS-121)
2006年6月
ロジスティクス
ノード1
天底16 PMA-3
2007年8月
組み立て
ノード1
天底
ボルトを外している間の断続的な障害。オンオービットステータスアーカイブ(NASA / HQ、2007年)、p。816 17 ノード2(ハーモニー)
2007年10月
組み立て
ノード1
ポート
ボルト1-4は、PMA-3がデメイトして以来、失敗したままでした。問題は、ロードセルの小さな線形の負のシフトであると考えられています。コマンドに変更はありません。STS-120 / FD04パッケージを実行します。(NASA / MCC、2007年)18 PMA-2
2007年11月
組み立て
ノード2
右舷 19 ノード2(ハーモニー)+ PMA-2
2007年11月
組み立て
USラボ
前方 20 欧州研究所(コロンバス)
2008年2月
組み立て
ノード2
右舷
FODはノード2右舷ACBMリング表面について報告しました。EVA洗浄プロセスが確立されました。STS-122 / FD05パッケージを実行します。(NASA / MCC、2008年)21 ELM-PS
2008年3月
組み立て
ノード2
天頂 22 日本の実験モジュール(きぼう)
2008年5月
組み立て
ノード2
ポート23 ELM-PS
2008年5月
組み立て JEM 天頂 24 MPLM(STS-126)
2008年11月
ロジスティクス
ノード2
天底25 PMA-3
2009年8月
組み立て
ノード1
ポート 26 MPLM(STS-128)
2009年8月
ロジスティクス
ノード2
天底
ボルト4-1、ノード2の天底:バースで高トルク、バースで詰まっている(IVAを交換)。ボルト2-1に記載されているロードセルドリフト。CPAコネクタへの損傷の以前の発生率が報告されました。STS-128 / FD10実行パッケージ。(NASA / MCC、2009)、STS-128 / FD11実行パッケージ。(NASA / MCC、2009年)27 ISS-HTV1
2009年9月
ロジスティクス
ノード2
天底28 PMA-3
2010年1月
組み立て
ノード2
天頂
キューポラの停泊中に複数のボルトが詰まった。前哨基地の運営(デンプシー、2018年) 29 ノード3(静けさ)+キューポラ(STS-130)
2010年2月
組み立て
ノード1
ポート30 PMA-3
2010年2月
組み立て
ノード3
ポート 31 キューポラ
2010年2月
組み立て
ノード3
天底 32 MPLM(STS-131)
2010年4月
ロジスティクス
ノード2
天底33 ISS-HTV2
2011年1月
ロジスティクス
ノード2
天底
OOS- 2011年1月27日(NASA / HQ、2011年)34 PMM
2011年2月
組み立て
ノード1
天底 35 MPLM(STS-135)
2011年7月
ロジスティクス
ノード2
天底 36 ISS-SpX-D
2012年5月
ロジスティクス
ノード1
天底37 ISS-HTV3
2012年7月
ロジスティクス
ノード2
天底 38 ISS-SpX-1
2012年10月
ロジスティクス
ノード2
天底 39 ISS-SpX-2
2013年3月
ロジスティクス
ノード2
天底40 ISS-HTV4
2013年8月
ロジスティクス
ノード2
天底 41 ISS-Orb-D1
2013年9月
ロジスティクス
ノード2
天底 42 ISS-Orb-1
2014年1月
ロジスティクス
ノード2
天底 43 ISS-SpX-3
2014年4月
ロジスティクス
ノード2
天底
16本のボルトのうち15本のみ。16番目のボルトが拘束されていました。DSR-04 / 20/14(NASA / HQ、2014) 44 ISS-Orb-2
2014年7月
ロジスティクス
ノード2
天底 45 ISS-SpX-4
2014年9月
ロジスティクス
ノード2
天底 46 ISS-SpX-5
2015年1月
ロジスティクス
ノード2
天底
DSR – 2015年1月12日(NASA / HQ、2015年) 47 ISS-SpX-6
2015年4月
ロジスティクス
ノード2
天底
DSR-04 / 17/15(NASA / HQ、2015)48 HTV-5
2015年8月
ロジスティクス
ノード2
天底
DSR-08 / 24/15(NASA / HQ、2015)49 OA-4
2015年12月
ロジスティクス
ノード1
天底
DSR-12 / 09/15(NASA / HQ、2015)50 OA-6
2016年3月
ロジスティクス
ノード1
天底
DSR-03 / 28/16(NASA / HQ、2016年) 51 ISS-SpX-8
2016年4月
ロジスティクス
ノード2
天底
DSR – 2016年4月18日(NASA / HQ、2016年) 52 ビーム
2016年4月
組み立て
ノード3
後部
DSR – 2016年4月18日(NASA / HQ、2016年) 53 ISS-SpX-9
2016年7月
ロジスティクス
ノード2
天底
DSR – 2016年7月20日(NASA / HQ、2016年)54 OA-5
2016年10月
ロジスティクス
ノード1
天底
DSR – 2016年10月23日(NASA / HQ、2016年)55 HTV-6
2016年12月
ロジスティクス
ノード2
天底
DSR – 2016年12月13日(NASA / HQ、2016年) 56 ISS-SpX-10
2017年2月
ロジスティクス
ノード2
天底
DSR – 2017年2月23日(NASA / HQ、2017年)57 PMA-3
2017年3月
組み立て
ノード2
天頂
DSR – 2017年3月27日(NASA / HQ、2017年)58 OA-7
2017年4月
ロジスティクス
ノード1
天底
DSR – 2017年4月24日(NASA / HQ、2017年) 59 ISS-SpX-11
2017年6月
ロジスティクス
ノード2
天底
DSR – 2017年6月5日(NASA / HQ、2017年)。ACBMリング面は、昨年3月にEVAによって清掃されました。DSR – 2017年3月30日(NASA / HQ、2017年) 60 ISS-SpX-12
2017年8月
ロジスティクス
ノード2
天底
DSR – 2017年8月16日(NASA / HQ、2017年)61 OA-8E
2017年11月
ロジスティクス
ノード1
天底
DSR – 2017年11月14日(NASA / HQ、2017年) 62 ISS-SpX-13
2017年12月
ロジスティクス
ノード2
天底
DSR – 2017年12月17日(NASA / HQ、2017年) 63 ISS-SpX-14
2018年4月
ロジスティクス
ノード2
天底
DSR – 2018年4月4日(NASA / HQ、2018)64 OA-9E
2018年5月
ロジスティクス
ノード1
天底
DSR – 2018年5月24日(NASA / HQ、2018) 65 ISS-SpX-15
2018年6月
ロジスティクス
ノード2
天底
DSR – 2018年7月2日(NASA / HQ、2018)66 HTV-7
2018年9月
ロジスティクス
ノード2
天底
DSR – 2018年9月27日(NASA / HQ、2018) 67 ISS-SpX-16
2018年12月
ロジスティクス
ノード2
天底
DSR – 2018年12月8日(NASA / HQ、2018) 68 CRS NG-11
2019年4月
ロジスティクス
ノード1
天底
DSR – 2019年4月19日(NASA / HQ、2019年)。ACBMリング面は、昨年3月にEVAによって清掃されました。DSR – 2019年3月22日(NASA / HQ、2019) 69 ISS-SpX-17
2019年5月
ロジスティクス
ノード2
天底
DSR – 2019年5月6日(NASA / HQ、2019) 70 ISS-SpX-18
2019年7月
ロジスティクス
ノード2
天底
DSR – 2019年7月28日(NASA / HQ、2019)71 HTV-8
2019年9月
ロジスティクス
ノード2
天底
ISSステータス– 2019年9月28日(NASA / HQ、2019) 72 CRS NG-12
2019年11月
ロジスティクス
ノード1
天底
DSR – 2019年11月4日(NASA / HQ、2019)。 73 ISS-SpX-19
2019年12月
ロジスティクス
ノード2
天底
DSR – 2019年12月8日(NASA / HQ、2019) 74 CRS NG-13
2020年2月
ロジスティクス
ノード1
天底
DSR – 2020年2月18日(NASA / HQ、2020) 75 ISS-SpX-20
2020年3月
ロジスティクス
ノード2
天底
DSR – 2020年3月9日(NASA / HQ、2020)76 HTV-9
2020年5月
ロジスティクス
ノード2
天底
ISSステータス– 2020年5月25日(NASA / HQ、2020) 77 CRS NG-14
2020年10月
ロジスティクス
ノード1
天底
ISSステータス– 2020年10月5日(NASA / HQ、2020) 78 NRAL司教
2020年12月 NRAL Ops ノード3
ポート
ISSステータス– 2020年12月21日(NASA / HQ、2020)。軌道への最初の配達。 79 CRS NG-15
2021年2月
ロジスティクス
ノード1
天底
ISSステータス– 2021年2月22日(NASA / HQ、2021)
用語集
CBMの文献で使用されている多くの用語は、他のコンテキストでの使用法と常に一致しているわけではありません。開発プログラムに固有に定義されたものも参照や他のトピックとの継続性を向上させるために、ここに定義が含まれています。
受け入れ
「アイテムが適切な技量で設計されたように製造され、仕様要件に従って実行され、納品に受け入れられることを実証するプロセス。」資格と対比
。10-1ページの
環境テスト要件(NASA / ISSP、2003)を参照して
分析
正式な文脈では、技術的または数学的モデルまたはシミュレーション、アルゴリズム、チャート、または回路図、および代表的なデータによる検証。デモンストレーション、
検査、テストと
対比
。ACBMDevを参照してください
。スペック (BD&SG、1998) §4.2.1.2。
両性具有
両側が同じコネクタの特性。つまり、「性別の違い」を割り当てることはできません。非両性具有と対比
。宇宙船のドッキングおよび停泊メカニズムも参照してください 組み立て
2つ以上の取り付け部品の特定の配置。CBM仕様のコンテキストで使用される場合、CBMの「半分」(ACBM全体またはPCBM全体のいずれか)。CMAN要件(NASA / ISSP、2000) §B.2を参照してください 停泊
軌道上で2つのエンティティを構造的に結合(「嵌合」)する方法。たとえば、組み立てやメンテナンスのための検索操作など。アイテムの一方または両方は、交配イベントの前に独立した制御権限の下で動作している宇宙船である可能性が普遍的に合意された概念的な定義は存在しないようです。CBMのコンテキストでは、明確な違いは
ACBMDevにスペック (BD&SG、1998) §6.3:
a)ACBM (sic)とそれに接続された要素をACBMのキャプチャ機能内に
配置することをサポートするデータを提供する
b)配置されたPCBMとそれに接続された要素をキャプチャします
c)キャプチャされたPCBMとのインターフェースをリジッド化します。
宇宙船のドッキングおよび停泊メカニズムも参照してください 壊滅的な危険
次のいずれかの損失による恒久的な障害または致命的な人身傷害を引き起こす可能性のある危険:打ち上げまたは整備車両、SSMB、または主要な地上施設。ACBMDevを参照してください
。スペック (BD&SG、1998) §6.3。
追跡車両
ドッキング操作において、接近している車両は、通常、アクティブな操作制御下にスペースシャトルランデブーの歴史(Goodman、2011年)全体の使用法を参照してください
。停泊プロセスの用語の使用には一貫性がありません。多くの分析では、PCBMを備えた要素を単に指します。対象車両と対比 成分
文脈における
環境試験要件(NASA / ISSP、2003) ;最小「成分は、機能分析の目的のためのエンティティとして見物品、製造、メンテナンス、または記録保持を構成する部品の集合体である:§10.2分散システム用に指定されたエンティティ。例としては、油圧アクチュエータ、バルブ、バッテリー、電気ハーネス、個々の電子アセンブリ、軌道交換可能ユニットなどが」
デモンストレーション
正式なコンテキストでは、特定のシナリオで設計された機能を実行するアイテムの操作、調整、または再構成による検証。項目は計装され、定量的制限またはパフォーマンスが監視される場合がありますが、実際のパフォーマンスデータではなくチェックシートのみを記録する必要が分析、
検査、テストと
対比
。ACBMDevを参照してください
。スペック (BD&SG、1998) §4.2.1.3。
ドッキング
軌道上で2つのエンティティを構造的に結合(「嵌合」)する方法。たとえば、組み立てやメンテナンスのための検索操作など。アイテムの一方または両方は、交配イベントの前に独立した制御権限の下で動作している宇宙船である可能性が普遍的に合意された概念的な定義は存在しないようですが、ほとんどの実装には、追跡車両の相対運動エネルギーを使用して
、相手に影響を与えるラッチを作動させることが含まれます。CBMのコンテキストでは、最終相対速度の制限により、要件を満たすための許容可能な手段としてのドッキングが排除されます。ACBMDevを参照してください
。スペック (BD&SG、1998) §3.2.1.2.2(キャプチャ時のACBMに関するPCBMの相対速度に要件を課します)および
宇宙船のドッキングおよび停泊メカニズム。
EVA(船外活動)
船外活動を
参照してください パッケージを実行する
「実行」パッケージは、飛行計画、短期計画、手順の更新、スペースシャトルおよびISSシステムの運用に必要なデータ、飛行中の保守手順、在庫保管データ、ソフトウェアアップグレード、飛行メモ、公開用のスクリプトで構成されます。イベント、およびその他の指示。参照
ホイットニー、Melendrez&ハドロック(2010) 40ページ。
フランジ適合
適合荷重は、ボルト締め時にジョイント全体の相対的なたわみを排除するために適用される荷重です。それらは、ジョイントの部材と支持構造(例えば、隔壁)の剛性に起因します。CBMの文献では、「コンプライアンス」という用語を同義語として使用することが骨折制御要件(NASA / SSPO 2001)のB-6ページおよび
Illi(1992)の5ページ(pdfページネーション)の剛性の定義を参照してください 検査
正式な文脈では、アイテムの目視検査または説明文書のレビューによる検証、および適切な特性を所定の基準と比較して、特別な実験装置または手順を使用せずに要件への適合性を判断します。分析、
デモンストレーション、テストと
対比
。ACBMDevを参照してください
。スペック (BD&SG、1998) §4.2.1.1。
IVA(車内活動)
海面で見られる大気のようなものに内部的に加圧されている宇宙船の内部で与圧服なしで行われた作業。多くの場合、「シャツスリーブ環境」で発生すると言われます。EVAと対比 モジュール
ISSでのこの用語の正確な定義は、コンテキストによって異なります。これは、軌道上ISSに取り付けられている事前統合されたユニットに一般的に使用されます。CBMの文献で使用されている場合、これは「加圧モジュール」の短縮版であり、「加圧エレメント(PE)」と同義です。多くの情報源は、これらすべての用語を同じ意味で使用しているようです。CBMのコンテキストでは、停泊前に加圧することはできませんが、停泊が完了した後に圧力を含めることができるものが含まれます(たとえば、キューポラ、与圧結合アダプター)。
機械アセンブリの移動
車両のある機械部品の別の部品に対する動きを制御する機械的または電気機械的装置。10-3ページの
環境テスト要件(NASA / ISSP、2003)を参照して
非両性具有
一方が他方と異なるコネクタの特性。このようなコネクタは、「性別」と呼ばれることがよくこの概念は、「異種」と呼ばれることも対比
両性具有。宇宙船のドッキングおよび停泊メカニズムも参照してください NRAL(NanoRacks Airlock)
NRALは、要素の正式な命名法(NanoRacks Bishop Airlock)の代わりに、NASAステータスレポートで使用されることがある略語です。
プリロードされたジョイント
宇宙ステーションプログラムで使用されているように、プリロードされたジョイントは、クランプ力が次のように十分なジョイントです。b)フランジの分離によってジョイントの剛性が変化しないことを保証するため。c)圧力シール(存在する場合)がフランジの分離の影響を受けないようにする。「プレ」は、サービス負荷にさらされる前に、ジョイントが最初に作成されたときに存在するという意味で使用されます。クランプ力は通常ボルトによって提供されますが、他のタイプの機械装置によって提供することもできます。参照
構造設計の要件(NASA / SSPO、2000)ページB-5を。
圧力減衰テスト
圧力と温度が経時的に記録されている間、既知の量の加圧ガスが試験中のシールの界面を透過および/または漏れます。この方法は低コストで広範囲のリークレートに適用できますが、「実現可能性を減らす」といういくつかの制限がOravec、Daniels&Mather(2017)pp1-2を参照してください 圧力容器
貯蔵されたエネルギーまたは圧力の特定の基準を満たす、主に気体または液体の加圧貯蔵用に設計された容器。構造設計要件(NASA / SSPO、2000)を参照してください 加圧エレメント
モジュールを
参照してください 加圧構造
圧力が設計荷重に大きく影響する車両荷重を支えるように設計された構造。参照
構造設計の要件(NASA / SSPO、2000)の付録Bを
ポート
一貫した方法で使用され一部の情報源では、貫通した一次構造隔壁(ハッチで密閉)とCBMの組み合わせ。他の情報源では、CBMが使用されている場所(バルクヘッドとハッチの有無にかかわらず)。
PDRS(ペイロード展開および検索システム)
ペイロードベイ内のアイテム、特にフライトリリース(または嵌合)が計画されたアイテムを保持および操作するために使用されるシャトルサブシステムおよびコンポーネントのコレクション。要素には、
シャトルRMS、ペイロード保持ラッチアセンブリ、グラップルフィクスチャ、ターゲット、およびCCTVシステムが含まれていました。ペイロードベイユーザーズガイド(NASA / NSTS、2011年)を参照してください 一次構造
大きな適用荷重を維持し、適用荷重の反力を分散するための主要な荷重経路を提供する飛行体または要素のその部分。また、圧力や熱負荷などの重要な負荷を維持するために必要な主要な構造であり、それが失敗すると壊滅的な危険が生じACBMDevを参照してください
。スペック (BD&SG、1998) §6.3および
構造設計要件(NASA / SSPO、2000)付録B。
近接操作
ほぼ連続的な軌道制御を特徴とする、別の宇宙船から2,000フィート(610 m)以内の1つ(または複数)の独立して制御される宇宙船による操作。スペースシャトルランデブーの歴史(Goodman、2011年)全体の使用法を参照してください
。ランデブーコントロールと対比 資格
「認定とは、ハードウェアとソフトウェアの設計、製造、および組み立てが、環境条件にさらされたときに設計要件に準拠していることを証明するプロセスです。」アクセプタンスと対比
。10-5ページの
環境テスト要件(NASA / ISSP、2003)を参照して
姿勢制御システム(RCS)
姿勢制御システム(ACS)の一種。RCSは、重心の軌道パラメータを変更せずに宇宙船の向きを管理するためのニュートンの第2法則の積極的な実装によって区別されます。
推進RCSは、そのように設計されている場合、軌道マヌーバ(宇宙船の軌道パラメーターを変更するためのケプラーの法則の実装)にも使用できます。参照
カプラン(1976)のpを。2および第3章から第4章。
ランデブー
別の宇宙船の軌道パラメータに一致するように1つの宇宙船によって操縦します。これらの操作により、2つの宇宙船が非常に接近して配置されるため、「軌道力学」の数学が、2つの宇宙船をさらに近づける能力を支配しなくなります。これらの操作は通常、別の宇宙船から2,000フィート(610 m)を超える範囲で独立して制御される宇宙船によって実行されます。それらは、数十分以上の間隔で発生する軌道制御操作によって特徴付けることができます。スペースシャトルランデブーの歴史(Goodman、2011年)全体の使用法を参照してください
。近接操作と対比 RMS(リモートマニピュレーターシステム)
宇宙船の近くでペイロードを操作するために使用される遠隔ロボット装置(ドッキングの端末操作に匹敵する範囲)。いくつかの例がCBMのドキュメントに関連するものは、シャトルRMS(SRMS)と宇宙ステーションRMS(SSRM)です。この2つは、口語的にはそれぞれ「Canadarm」および
Canadarm2として知られ
ていますが、ドキュメントでは、ここに示す命名法のみを使用しています。
サブアセンブリ
いくつかの参照アセンブリに関して、参照アセンブリ内に完全に含まれるアセンブリ。CBMのコンテキストでは、検証アクティビティをexsituで実行できるメカニズム。ここでの定義は、
CMAN要件(NASA / ISSP、2000)、§B.2に従いますが、アプリケーションのニュアンスについては、環境テスト要件(NASA / ISSP、2003) §10.2を参照してください 対象車両
ドッキング操作では、車両に接近します。目標車両はアクティブな姿勢制御下にある場合がありますが、通常はアクティブな操縦制御下にはありません。スペースシャトルランデブーの歴史(Goodman、2011年)全体の使用法を参照してください
。この用語は、停泊に関する技術文献に一貫して見られません。多くのCBM分析では、この用語はACBMを備えた要素を指します。追跡車両と対比 テスト
正式な文脈では、すべての適切な条件下でのアイテムの体系的な実行による検証。パフォーマンスは、実際のまたはシミュレートされた機能的または環境的刺激の制御された適用中または適用後に定量的に測定されます。テストから得られたデータの分析はテストの不可欠な部分であり、必要な結果を生成するために自動化されたデータ削減を伴う場合が分析、
デモンストレーション、検査と
対比
。ACBMDevを参照してください
。スペック (BD&SG、1998) §4.2.1.4。
熱質量
熱分析では、「静電容量」の同義語であり、電気ネットワーク分析での使用法に類似しています。熱質量は、文字通り大きな質量、または材料の大きな蓄熱容量(たとえば、ほぼ一定の温度で相が変化するもの)のいずれかによって達成できます。参照してください
ギルモア(1994)ページ5-24に。
メモと引用
^ 示されている長さは、結合された前庭のものです。個々の辺の長さについては、デザインギャラリーを参照して両側の直径は同じです。PCBM指定質量:PCBM開発を参照してスペック (BD&SG、1998) §3.2.2.3。ACBM指定質量:ACBMDevを参照してスペック (BD&SG、1998) §3.2.2.2。表示されている質量は「指定どおり」です。文献で報告されている重みはごくわずかであり、ハードウェアの特定の補完を示すものはありませんでした。飛行時の質量は、指定された値と異なる場合が運用日とミッション数については、運用ギャラリーをご覧示されている開発者は、仕様の署名ページに基づいています。PCBMは複数のソースによって製造されたようですが、包括的な評価は行われませんでした。
^ リング素材: Illi(1992)。シリコーン温度性能: OリングHDBK(PHC、2018) 2-5ページ。フルオロカーボンの摩耗性能: Christensen、et。al。(1999) 5ページ。
^ ACBMDev。スペック (BD&SG、1998) §3.3。
^ リング(ACBMとPCBMの両方)のインターフェース機能の形状は、CBM / PE ICD(NASA / ISSP、2005)に詳細に記載されています。たとえば、リングが取り付けられるOリングの溝の形状を図3.1.4.2-3と-4および図3.3.2.1-7に示し、ACBM / PEインターフェースのスカラップの寸法を図3.1.4.2–5および-に示します。 6.6。4A Maintenance Book(NASA / MOD、2000)、§§1.2.518-520には、IVAシールと関連ハードウェアの詳細なインストール手順と追加の写真が含まれています。
^ 前庭閉鎖パネルインターフェース: CBM / PE ICD(NASA / ISSP、2005) §3.3.8。軌道上モジュール間ジャンパーエンベロープ:ICD§3.1.4。
^ のE F GのH 、I jはk個のL 、M 、N 、O 、P 、Q 、R 、S 、T 、U 、V 、W 、X 、Y 、ZのAA 、AB 、ACの広告AEをAF 、AGのああ愛AJをAKら午前のAO 、AP 、AQ 、ARのように、AU 、AV 、AWをax ay az ba bb
部品の識別と命名法は、一般にFoster、Cook、Smudde&Henry(2004)の図3に記載されているとおりであり、AssemblyQualの図2-1と同じです。テストレポート(BD&SG、1998年)。どちらの場合も、図はPCBMおよびアキシャルポートで使用されるタイプIACBMにあるコンポーネントのみを対象としています。これらは、CBM / CBMおよびCBM / PEIVAシールとすべての付属機器の識別を省略しています。また、ラジアルポートACBMに取り付けられているバンパー、およびPCBMの対応する機能(文献では「バンパー」または「フォロワー」とさまざまに呼ばれています)の識別も省略されています。多くの部品は、CBM / PE ICD(NASA / ISSP、2005)およびAssemblyQualの付録Aでも識別されています。テストレポート(BD&SG、1998)。ただし、命名法は他の2つの参考文献とは異なる場合が追加のソース参照については、各元の画像アップロードのトーク(ディスカッション)ページを参照して ^ CBMの機能は、文献で一貫して説明され明らかな不一致がプロジェクトの存続期間中の設計の進化に起因するのか、それとも異なる作者の視点に起因するのかは不明です。Illi(1992) p。を比較して282、 Winch&Gonzalez-Vallejo(1992) p。67、 Searle(1993) pp 351-352、 ACBMDev。スペック (BD&SG、1998) §3.3.1および§6.3(それ自体は完全に一貫しているわけではありません)、PCBMDev。スペック (BD&SG、1998) §§3.1.2-3.1.3、AssemblyQualの§2.6.3の公称テストフロー。テストレポート(BD&SG、1998)、p。前哨基地の運営(デンプシー、2018年)の39、 STS-120 / FD04 Execute Pkgのpp6-7,12-13(pdfページネーション)のパイロットおよびミッションスペシャリスト2のタイムライン。(NASA / MCC、2007)、 3A Assembly Ops(NASA / MOD、2000)のpp 200-203に記載されている詳細な手順、および5A Assembly Ops(NASA / MOD)のpp23-97のステージ5Aに定義されている手順、2000)。現在の説明は、開発仕様にある2つの説明をマージしたものです。
^ 一部の著者(たとえば、 Winch&Gonzalez-Vallejo(1992)、 Foster、Cook、Smudde&Henry(2004))は、アライメントをACBMによって積極的に実行される「機能」として扱っているようです。他の人(例えば、前哨基地の運営(Dempsey、2018))は、ACBMによって課せられた制約を構成する「物理的特性」としてそれをより議論しています。視点の違いに対する明白な解決策は、文献では利用できないようです。
^ Foster、Cook、Smudde&Henry(2004)(p。303)およびCook、Aksamentov、Hoffman&Bruner(2011) p。27(pdfページネーション)は両方とも、ACBMを2セットのアライメント構造(粗いアライメントガイドと細かいアライメントピン)を持っていると説明しています。アセンブリQUAL。テストレポート(BD&SG、1998)、付録Bは、「バンパー」を認定されたテスト記事の一部として明示的に識別していますが、そのレポートの図2-1(Foster、Cook、Smudde&の図3と同じ)には表示されヘンリー(2004))。レポートでは、バンパーを調整の準備段階として説明しており、 CBM / PE ICDの§3(NASA / ISSP、2005)は、バンパーをラジアルポートのACBMの一部として最終的に特定しています(図3.1.4-9の注4)。RTL / Capture Envelope調査では、他の接触面に到達する前にバンパーが特定の方向への動きを制限する25のケース(調査対象の124のうち)を特定しています。つまり、粗調整ガイドの前の調整の段階です。すべてのバンパーコンタクトは、2つのリング間の軸方向の間隔が3.75インチ以上であり、アライメントガイドがその間隔の前後まで最優先の制約にならないことを示しています。ソース内およびソース間のアライメントステージの数におけるこの明らかな切断について、明らかな解決策は見つかりませんでした。
^ ACBM(「回転と平行移動の組み合わせ」)に関するPCBMの軌道エンベロープは、 AssemblyQualの付録EおよびFの軌道プロットによって示されます。テストレポート(BD&SG、1998年)。多くの軌道は単調ではなく、キャプチャラッチの負荷が最初に増加し始めた後、実際には数秒間回転が増加します。場合によっては、翻訳も増加します。ただし、すべての場合において、軌道はPCBMがACBMに位置合わせされ、ACBMからわずかに分離された状態で終了します。
^ ACBMDev。スペック (BD&SG、1998) §3.1。ACBM仕様。Foster、Cook、Smudde&Henry(2004)の303ページ(脚注3)で識別されます。PCBMのDev。スペック (BD&SG、1998)は、 Christensenらの参考文献2として識別されています。al。(1999)(pdfページ6)。2つの仕様には、共通の要件が多数含まれています。参照の数を減らすために、2つの仕様のうちの1つだけがここで通常引用されます。明示的に引用された参照が2つの構成アイテムの1つにのみ適用される場合は、それらの参照の内容とコンテキストから明らかです。
^ 軌道の中心に向かう(「天底」)または離れる(「天底」)、軌道の中心より下(「左舷」)または上(「右舷」)の軌道移動方向(「前方」)または反対方向(「後方」) )足を天底に向けて前方を向いたときの軌道面。参照してください前哨(デンプシー、2018)営業、ページXV(PDFのページネーションで17)。
^ ACBMを設置できる方向は、CBM / PE ICD(NASA / ISSP、2005) §3.3.2.1.4に記載されています。認定温度は、環境試験要件(NASA / ISSP、2003)(SSP 41172)、424ページおよび425ページ(pdfページ付け)からのものです。それらはMiskovishらでも取り上げられています。al(2017) slide5。公開された情報源間および情報源内に矛盾があるようです。SSP 41172は、ボルトとナットの認定温度範囲(-50F- + 150F)を識別します。これは、アセンブリ認定テストでの使用について参照する範囲(-70F- + 190F)よりも小さく、同じドキュメント内のコンポーネントレベルのテスト。Miskovishに示されている範囲は、SSP41172に示されている範囲よりも大幅に小さくなっています。ACBMDevの図6 。スペック (BD&SG、1998)は、ミスコビッシュが描いた範囲を「ボルトアップ」に適用できるものとして特定しています。この仕様ではさらに、ナットの取得に-170F〜 + 170F、キャプチャに-200F〜 + 200Fの温度差の範囲が必要です(両方とも-70F〜 + 170Fの絶対範囲)。入手可能な情報源では、不一致の調整は明らかではありません。
^ ACBMDev。スペック (BD&SG、1998) §3.1。
^ Foster、Cook、Smudde&Henry(2004)は、PCBMのサーマルスタンドオフをメカニズムと明示的に言及し、パワードボルトナットを「フローティング」(つまり、メカニズム)と呼んでいます。ナットの設計は、スタンドアロンアセンブリとして、振動、熱真空条件、およびライフサイクル(耐久性)に適合しています。CBMボルト/ナット品質を参照してテストレポート(BD&SG、1998)表1-1(p.1-7)。これは、環境テスト要件(NASA / ISSP、2003) §4.2.13の要件とよく一致しています。
^ 「プッシュオフ」について: PCBMDev。スペック (BD&SG、1998) §3.2.1.6:「..は、離岸中の要素の分離のための正味の力とモーメントを提供するものとします。」§4.3.2.1.6では、この点に関して検証する要素として、シールの「スティクション」とRMS抵抗を特定しています。シールの「スティクション」(接着)はかなりのものになる可能性がDanielsらで報告されたサブスケールテスト。al。(2007)(pdf 15ページ)直径12インチ(30 cm)のシングルビーズ試験片シールの場合、CBMタイプのエラストマーシールが接合面から約150 lbf(670 N)で解放される際の接着力を推定しました。安定化については、304ページの上部にあるFoster、Cook、Smudde&Henry(2004)を参照して ^ Christensen、et。al。(1999) p。196。
^ PCBMDev。スペック (BD&SG、1998) §3.2.1.8.2。前哨基地の運用(Dempsey、2018)、図2(p。37)およびSLP.jpgにマウントされたファイル:PMA3も参照して ^ 隔壁は、文献では「停泊プレート」と呼ばれることがよくキューポラと3つのPMAには、停泊していないときに圧力を保持するための隔壁がありません。
^ ザ・PCBMのDev。スペック (BD&SG、1998)図6では、キャプチャラッチが作動している場合は2つの船外フランジ間で+/- 200F、動力付きボルトナットを取得する場合は+/- 170F、インターフェイスは固定されています。
^ シャワーキャップの取り外し: STS-120 EVA Cklist(NASA / MOD、2007)、 pdfpp。130および254(写真)。打ち上げロックの取り外し: STS-123 EVA Cklist(NASA / MOD、2008)(pdfページ131)。起動ロックは、電動ボルトを駆動することによっても取り外すことができます(pdfp。312、ステップ2.6.D、注2)。一部の港周辺で他の活動が行われたため、時間は異なります。これまでのすべてのACBMの起動は、NSTSの時代に行われました。
^ ザ・ISS /シャトル共同オプス。(LF1)(NASA / MOD、2005)、pdfpp。523-527は、PCBMのGask-O-Sealの後に見つかった異物損傷(FOD)の着陸後の写真を含む、ACBMとPCBMの両方の詳細な検査基準について説明しています。 UF-2(STS-114)。
^ PCBMシールをクリーニングするためのツールのプロビジョニングは、 STS-122 EVA Cklist(NASA / MOD、2007)のpdfページ177のEVA回避策クリブシートで参照されています。
^ タスクの時間と説明: STS-123 EVA Cklist(NASA / MOD、2008)、pdfページ56、70。
^ 嵌合操作の準備はpから始まります。5A Assembly Ops(NASA / MOD、2000)の82(pdfページネーション)。これらの手順は、フライトクルーまたは地上クルーのいずれかが実行できます。他のいくつかの例は、オンラインで入手可能なドキュメントのステージ3Aから存在します。停泊前のボルトアクチュエータテスト(「BBOLTCK」)の説明は、 3A Assembly Ops(NASA / MOD、2000)のp。210(pdfページネーション)。他の多くのCBMコマンドの詳細な説明が含まれています。
^ ACBMシール面のクリーニング: STS-122 / FD05パッケージを実行します。(NASA / MCC、2008)、 pp。2、27およびDSR – 2017年3月30日(NASA / HQ、2017)。CBMコンポーネントへのEVAアクセス、およびその取り外しと交換については、 STS-124 EVA Cklist(NASA / MOD、2008)の224〜260ページ(pdf)で詳しく説明されています。「PrepforMate」のCPAの誤動作は、 5Aアセンブリの誤動作(NASA / MOD、2000)の26〜88ページ(pdf)に記載されています。
^ 運用フローは、前哨基地の運用(Dempsey、2018)、243ページから要約されています。SVSおよびCBCSビジュアルキューシステムの使用(オペレーターのディスプレイの写真を含む)は、44〜45ページに記載されています。
^ Ready-to-Latchインジケーターの使用方法の説明は、前哨基地の運用(Dempsey、2018)の44ページに4つのRTLのうちの3つ、およびRTLに抵抗できる状態への参照(たとえば、位置保持)は、 5A Assembly Ops(NASA / MOD、2000) pからのものです。64(pdfページネーション)。振り付けの例については、PMMレオナルドの移転のビデオを参照して操縦操作の緊急時対応計画のいくつかの例は、 STS-114 PDRS Ops Cklist(NASA / MOD、2004)に ^ 第1段階のキャプチャ設定、操作上の制約、完了基準、および実行時間: 5A Assembly Ops(NASA / MOD、2000)の64〜66ページ(pdfページネーション)。すべてのCBM操作に負荷制御が必要なわけではありません。STS-130/ FD09実行パッケージを参照して(NASA / MCC、2010年)。
^ NSTS時代の第2段階のキャプチャ: 5A Assembly Opsのp68(NASA / MOD、2000)。SSRMSを使用したキャプチャ中は、キャプチャコマンド間で断続的に操作され、負荷の蓄積をさらに軽減します。STS-128 / FD10 ExecutePkgを参照して(NASA / MCC、2009) 24ページ(pdfページネーション)。第2段階のキャプチャ:SRMSをテストモードにします。これにより、RTLが開く可能性が第2段階のキャプチャの終了時(約108秒)に示されるシャフト角度は、5A AssemblyOpsのp68からのものです。RTLの位置は、キャプチャラッチアークの上部よりも大幅に下にCBM / PEICD(NASA / ISSP、2005)のRTLの寸法を記入した側面図を、図3.1に示す明確な体積の高さと比較して .4.1-17。
^ 公称ボルトコマンドの説明は、 3A Assembly Ops(NASA / MOD、2000)、pp.210-211(pdf)に記載されています。予算時間を含む全体的なボルトアッププロセスは、 McLaughlin&Warr(2001) p。2、および5A Assembly Ops(NASA / MOD、2000)の73ページ(pdf)から開始します。後者の情報源の64ページ(pdf)は、「少なくとも8本のボルト」が「交互」でない場合、地上管制官が乗組員に進め方をアドバイスすると述べています。「少なくとも8本のボルト」の解釈は、STS-128がMPLMをインストールするまでに大幅に改訂された可能性がSTS-128 / FD10 ExecutePkgの23ページの注意を参照して(NASA / MCC、2009年)。ABOLT速度:McLaughlin&Warr(2001)2ページ。ソースは、コマンドの命名法について完全に一致し「ABOLT」、「ABOLTS」、「A Bolt」、「ABolts」と表示されます。一部の情報源は、この点に関して内部的に一貫性がありません。
^ CBMボルト/ナットQUAL。テストレポート(BD&SG、1998) p。3-2は、1,500 lbf(6.67 kN)の予荷重が、ボルトのロードセルの性能の許容領域の下端であると報告しています。上限は19,300lbf(85.9 kN)と見積もられています。
^ 熱安定化: McLaughlin&Warr(2001)(3ページ)は、等化ホールドが10,500 lbf(47,000 N)のはるかに高い前負荷で発生すると述べていますが、飛行文書はここで説明されているように読みます:109ページの注意バナーを参照してください( pdf)of 5A Assembly Ops(NASA / MOD、2000)。90°ボルトグループ間隔:212ページの下部近くにある3A Assembly Ops(NASA / MOD、2000)(pdfページネーション)。詳細なボルトの取り付け手順(完全なプリロードまで)は、5A Assembly Opsの110ページ(pdf)から始まります。後続のフライトでは、多くの場合、このタスクが地上管制官に割り当てられます。
^ 1ボルトおよび2ボルトの故障機能については、 Zipayなどを参照してal。(2012) pdfページ18および41、それぞれ。このリファレンスでは、2ボルトアウトのシナリオが発生した後、前庭への加圧アクセスを何らかの方法で復元できるかどうかについては説明し迅速な安全のための手順を含む詳細な解決手順は、 5Aアセンブリの誤動作(NASA / MOD、2000)のpdfページの8ページから索引付けされています。キャプチャラッチとReady-to-Latchインジケーターの障害に対処する手順は、 STS-128 / FD04 Execute Pkgの21〜30ページ(pdf)に記載されています。(NASA / MCC、2009年)。
^ ほとんどのポートでは、CPAは完全に削除されていますが、ノード1と2の天底ポートは軌道上で変更され、CPAを所定の位置に回転させています。DSR – 1/3/2018(NASA / HQ、2018)を参照して ^ 前庭の艤装の詳細な手順は、 5A Assembly Ops(NASA / MOD、2000)、pp。129-171(pdfページネーション)に記載されています。各前庭は少なくともわずかに異なり、一部(たとえば、キューポラ、PMA)は、ここに示す一般的な説明から大幅に逸脱しています。多くの場合、手順とNASAステータスレポートは、細かいリークチェックのために約8時間の休止を明確に示していますが、報告されたタイムラインの一部は、そのような操作に対応していないようです。M / Dセンターセクションの削除手順は、 5Aジョイントオペレーションの70ページ(pdfページ付け)から詳細に説明されています。(NASA / MOD、2000)、そこから予算の時間が取られましたが、 4Aメンテナンスブック(NASA / MOD、2000)は削除の予算の2倍です(pdfページ74)。
^ 内部でアクセス可能なCBMコンポーネント(CPA、ボルト、ナット、ラッチ、RTL)を取り外し、IVAシールを取り付けるための詳細な手順は、一般的な手順と同様に、4Aメンテナンスブック(NASA / MOD、2000)のPDFページの8ページに索引が付けられています。リークの特定用。損傷を防ぐための代替CPAインストールの手順は、 STS-126 / FD13 ExecutePkgに記載されています。(NASA / MCC、2008)、3ページ(pdf)。
^ 操作を終了するための準備はpから始まります。5A Assembly Ops(NASA / MOD、2000)の38(pdfページネーション)。
^ 組立飛行と比較したロジスティクス飛行の相対的な発生については、ミッション表を参照して時間の予算編成の詳細は、時間の経過とともに進化したようです。ロジスティクス要素(この場合はMPLM)の前庭の装備解除については、 5A.1 MPLMブック(NASA / MOD、2000)、134ページ(pdfページネーション)を参照して2人の乗組員の艤装解除への割り当ては、 STS-102 / FD10当初の計画(NASA / MCC、2001)に基づいており、タスクに割り当てられる時間が少なくなっています。現在の説明では、CBCSをインストールするための努力は考慮され最近の状況報告の非公式なサンプリングは、それが停泊作業の支援に使用されていないことを示唆しています。デメイトの再構成にかかる時間は、CPAローテーションキットが導入された後、おそらく大幅に短縮されました。4つのCPAのインストールは、 4Aメンテナンスブック(NASA / MOD、2000)の74ページ(pdf)で約2:30の予算でした。M / Dカバーセンターセクションの取り付けについては、 5Aジョイントオペレーションで詳しく説明しています。(NASA / MOD、2000)、170ページ(pdf)。アースストラップの取り外し手順は、その後すぐに続きます。前庭の見切りの撤去は、4A機内メンテナンスブックのpdfページ84では40分間の予算がありますが、共同運用ブック(5A)の70ページ(pdf)ではわずか20分間です。
^ 圧力試験装置の設置を含め、 STS-102 / FD10当初計画(NASA / MCC、2001)では減圧の予算が約75分でした。実際の減圧の40分間は、 5A.1 MPLM Book(NASA / MOD、2000)の150〜153ページの滞留時間を合計したものです。その参照では、乗組員のステップを可能にするためにいくらか長くなければならなかった全体的なタスク期間が省略されています。STS-102タイムラインは、5A.1 MPLMブックの編成と同様に、減圧が装備解除タスクに含まれていないことを示唆していますが、同じタイムラインでのMPLM出口の開始からCBMデメイトの終了までの4:30タイムラインはかもしれません。利用可能なドキュメントでは、明らかな時間予算の不一致の解決は明らかではありませんでした。圧力をメートル単位に変換するための許容誤差は、リファレンスで特定されているFluke 105Bメーターのすぐに利用できるマニュアルに基づいています(±0.5%)。マニュアルには、実験の不確かさが「示されている」か「フルスケール」であるかは示されここでは「実物大」を想定しています。圧力の制約の理論的根拠は、 OOS-01 / 22/10(NASA / HQ、2010)からです: “”… CBM(共通結合機構)シールを保護するために、デムする前に圧力が2mmHg未満であることを確認する必要が」制限自体は手順にありますが(たとえば、MPLMブック(5A.1)、pdfページ152)、その根拠はそこに特定され ^ DeberthのCBMのアクティブ化とチェックアウトは、地上管制または軌道から実行できます。手順の一般的な流れは、 3A Ground Handbook(NASA / MOD、2000)および5A Assembly Ops(NASA / MOD、2000)からのものです。DBBoltckコマンド(「BBoltck」コマンドとは異なる)は両方のドキュメントで明示的に要求されていますが、BBBoltckコマンドと区別する詳細な説明も理論的根拠も見つかりませんでした。地上でCBMをチェックアウトし、CPAの電源を入れたままにしておきます。STS-114/ FD11実行パッケージを参照して(NASA / MCC、2005)、pdfページ3。
^ STS-102 / FD10当初計画(NASA / MCC、2001)は、ノード1天底ACBMのdemate及び失活のため90分を割り当て。ボルトを緩める手順は、 5A Assembly Ops(NASA / MOD、2000)の57ページ(pdfページネーション)から始まります。±0.1回転の動作範囲が引用されています。手順の新しいエディションでは、位置公差が拡張されています。CBMボルト/ナットQUAL。テストレポート(BD&SG、1998) p。3-2は、ボルトを外すための成功基準を、1,600lb⋅in(180,000mN⋅m)を超えないピークトルクで予圧を軽減することとして識別します。McLaughlin&Warr(2001)は、4ページでそのトルクで0.5 RPMの速度制限を特定していますが、3ページでは、全負荷で反対方向の「Fボルト」コマンドが0.4RPMで実行されると報告しています。手順によって割り当てられた全体的な時間と合わせて考えると、これは、緩めが実際には16本すべてではなく4本のボルトのセットで実施されていることを示唆しています。
^ 5A Assembly Ops(NASA / MOD、2000)、58ページ(pdf)の緩み基準は、 AssemblyQualの5-7ページで報告された調査結果と一致しています。テストレポート(BD&SG、1998): “”…抽出中にボルトに示された荷重が1500ポンドを下回った場合は、追加のセットをどちらの方向にも作動させずに、完全な予圧から29回転以上完全に抽出する必要がこの規則に例外はありません。」この規則は、同じ情報源によって、そのような制約が課されていないアセンブリレベルの認定テストシーケンスのセットアップ中に最初のデメイトの一部で発生した損傷に起因すると報告されています。
^ ボルトの引き抜き、カバーの閉鎖、およびCBMのシャットダウン: 6A Assembly Ops(NASA / MOD、2001)、69〜91ページ。カバーの閉鎖は、カメラ画像によって視覚的に確認されます。
^ Demateの緊急時の操作は、 5Aアセンブリの誤動作(NASA / MOD、2000)のpdfページの8〜9ページに索引が付けられています。ドッキング解除とデバーシングの相対速度は、前哨基地の運用(Dempsey、2018年)の41ページに記載されています。
^ Node1のNadirポートの最初に設計された使用法については、 Link&Williams(2009)ページ1を参照してこのページには、ノード3をその場所に統合するために必要なエンジニアリング変更の詳細な説明が含まれています。ダイビングベルは水中で使用されるため、PMA3は基本的に使用されました。再設計と実装のプログラムによる説明については、PDFページの64-67ページの「前哨基地の運用(Dempsey、2018)」を参照して再ルーティングされたユーティリティの引用リストについては、 OOS-11 / 20/09(NASA / HQ、2009)を参照してこれは、参照されるISL接続の定義を提供しステータスレポートのリストは、リンクpp。2-5の詳細な説明とは異なるように見えます。2つの議論の調整は、入手可能な文書からは明らかではありませんでした。IMVの定義は、187ページの「前哨基地の運用」に ^ NASAの宇宙ステーション研究スリングショット発表(NASA / ISSP、2019)を参照して ^ Foster、Cook、Smudde&Henry(2004)(pdfページのp。319)およびAssemblyQual。テストレポート(BD&SG、1998)(ALQTR)(§3.2「前駆体発達活動」)は、同じ3つの重要な活動とそれに関連する要因を特定します。 3-2ページ)。2つの情報源は明らかに同じイベントを参照していますが(フォスターの図4はレポートの図3-3と同じです)、ディスカッションの構成が異なり、いくつかの異なる資料が含まれています。ALQTRは、パフォーマンスに関係する4番目のロジックチェーンを報告します。パワードボルトによるナットの買収について。フォスターとは、正式なテストレポートに記載されていない「フルスケールシールテスト」を指します。このテストでは、Zipayなどで要約ディスカッションも行われます。al。(2012)(pdfページのp。40-41)これは、他の2つの情報源と概ね一致していますが、詳細はあまりありません。
^ 外部負荷があり、前庭圧力がない(つまり、外部フランジとしての)負荷条件は、Zipayらの図39に示されています。al。(2012)。外部負荷と内部(前庭)圧力の両方の状態は、同じリファレンスの図40に示されています。
^ 破壊制御要件(NASA / SSPO 2001)と構造設計の要件(2000 NASA / SSPO、)詳細圧力容器及び加圧された構造は、それぞれ、骨折および構造荷重のために修飾されていることにより、プログラムのエンジニアリングプラクティスを。
^ 各バースは固有のRMSジョイント構成を持つことができ、バースされるモジュールの慣性特性は広範囲にわたって変化します(ISS(使用率)のリファレンス(NASA / ISSP、 2015))。解析は、負荷を定義し、メカニズムのストローク全体のパフォーマンスを予測するために使用されます。テストは、内部ダイナミクスが代表的な荷重の下で適切にモデル化されていることを確認するために使用されます。これには、重力の補償が含まれることがよく反復アプローチについては、Conley(1998)、p。589「展開分析」。宇宙船のメカニズムのテスト中に重力の影響がどのように補償されるかについては、「オフロードシステム」(Conleyの534ページ)の説明を参照して ^ 「適合荷重は、ボルトアップ中のシールのスクラブ動作を定義します…」アセンブリ品質。テストレポート(BD&SG、1998) p。3-5。Gask-O-Sealのボルトアップが完了した後のメーカー推奨の最大ギャップは0.003インチです( Gask-O-Seal Hdbk(PHC、2010) 9ページ)。工場で組み立てられたジョイントの製造条件の清浄度の重要性は、同じ参考文献の18ページ、およびHolkeboer(1993)の256〜257ページで説明されています。対照的に、CBM / CBMは「フィールドジョイント」であり、制御されていない環境で組み立てられます。PCBMを装備した要素の初期バースの打ち上げ環境は、(再利用された)シャトルペイロードベイでした。ペイロードベイ環境の清浄度については、ペイロードベイユーザーズガイド(NASA / NSTS、2011年)の§§4.1.3.3および4.2.3で説明されています。シャトルの引退以来、すべての配達は飛行専用のペイロードフェアリングの下で行われ、それぞれが独自の特性を持っていることが合理的に期待される可能性が ^ 典型的な軌道高度:前哨基地の運用(Dempsey、2018)、123ページ。地球軌道のこの領域は通常、熱圏と呼ばれます。
^ この地域では、高度とともにガスの温度が上昇し始めますが、密度が非常に低いため、宇宙船はその温度からほとんど加熱されません。環境の説明についてはNaturalEnvironments(Justh、ed。、2016) §5.1を、宇宙船に対する原子状酸素の一般的な影響の簡単なレビューについては§5.1.7を参照してシールの感度については、 Christensen他を参照してal。(1999)。摩擦に対する温度と真空の組み合わせの影響のトピックについては、 Conley(1998) pp。176と589、および第17章を参照して大気と真空の両方の条件下での摩擦データの広範囲にわたる現代的な調査については、潤滑ハンドブックを参照して宇宙産業(NASA / MSFC、1985年)。真空暴露(「ガス放出」)による化学組成の変化の簡単な説明については、Conleyの第9章を参照して ^ それらは放射を扱うため、これらの問題はしばしば「熱光学」と呼ばれます。熱環境の説明については、自然環境の§5.2(Justh、ed。、2016)を参照して ^ 直径約7フィートの場合、CBMは一般的なノードの表面積の10〜20%を占めます。この現象は方向性があり、(したがって)軌道パラメータに依存しますが、複数のポートが結合されていない期間、またはポートが攻撃的な方向で長期間結合されていない場合は無視できません。参照してください自然環境(Justh、エド。、2016)、§5.6.4、第3章ギルモア(1994)とコンリー(1998)の関連業務及びエンジニアリング宿泊技術の追加的な議論のための第20章。
^ 磁場は、宇宙船が軌道上のどこにあるかによって変化するため(「真近点角」)、通常は「地磁気」と呼ばれます。関連する特性は、関連する宇宙船の設計問題のいくつかとともに、自然環境の§5.3(Justh、ed。、2016)で説明されています。
^ ISSの高度でのプラズマ環境のパラメトリックな議論については、自然環境の§5.4(Justh、ed。、2016)を参照してISSの過剰な正電荷は、Z1トラス要素に取り付けられたプラズマコンタクタユニットを介して管理されます。それは宇宙船と充電された環境の間のアーク放電を排除します。Carpenter(2004)を参照して ^ 熱圏の電離放射線環境は、自然環境の§5.5(Justh、ed。、2016)に記載されています。効果は一般的に§5.5.3で説明されています。
^ たとえば、非定量的なM / D要件はACBMDevに文書化されています。スペック (BD&SG、1998) §3.2.5.12。流星/破片環境の最近の評価は、自然環境(Justh、ed。、2016) §5.6に記載されています。参照によると、破片は厳密には「自然」な起源ではありませんが、開発プロジェクトの管理外であるため、説明の目的でそのように扱われます。
^ この文脈では、「プルーム」とは、ロケットがノズルを離れた後のロケットの排気ジェットを指します。近接操作中、ターゲットへの接近を遅らせるために追跡車両によって発射されたロケットは、多くの場合、そのターゲットに向けられます(「ブレーキ操作」)。排気がターゲットに当たると、ターゲットを押しのける力が発生し、中心から外れた場合は、ターゲットを回転させます。排気ガスの組成によっては、プルームが対象車両の外側を汚染する可能性もプルームの衝突がターゲット車両に与える影響については、10ページ(pdfページネーション)から始まるシャトル/ LDEF検索操作(Hall、William M.、1978)で、それらを軽減するための操作について詳しく説明されています。汚染は、ターゲットの熱制御および発電能力を低下させる可能性がたとえば、スペースシャトルランデブーの歴史(Goodman、2011年)の第5章で、スカイラブと相互作用するアポロ宇宙船ジェットの説明を参照してプルームの形状と密度は直感的ではない場合がGriffen&French(1994)の166ページから始まる議論を参照して ^ アセンブリメカニズムの「ツリー」については、Cook、Aksamentov、Hoffman&Bruner(2011)の図1を参照して軌道上で大きなものを組み立てる必要性については、スペースシャトルランデブーの歴史(Goodman、2011年)の9ページで説明されています。16ページの同じリファレンスノートでは、出現した概念はマーキュリー計画の単身の宇宙船には危険すぎると見なされ、プロジェクトジェミニのより大きな乗組員に延期されました。しかし、マーキュリーには、パイロットが宇宙での距離と姿勢を推定する能力に関する飛行実験が含まれていました。ここでは、「アポロ時代」を抽象的に使用して、スカイラブとアポロ/ソユーズテストプロジェクトを含めています。より包括的な歴史的扱いについては、参考文献の15〜59ページを参照して ^ 参照してくださいスペースシャトルランデブーの歴史(グッドマン、2011) 、スペースシャトルプログラムでは、新たに発生した状況と要因の導入議論については、69ページ。同軸性に関するコメントは、 Cohen、Eichold&Heers(ed。)(1987)の4ページ(pdf 9ページ)にShuttle / LDEF Retrieval Ops(Hall、William M.、1978)には、rバーアプローチの物理学と数学の詳細な説明が含まれています。これには、rバーアプローチとSRMSを使用した自由飛行宇宙船の検索との関係についての説明が含まれます。停泊が開発された時間枠で知られている(または予想される)ことの理解は、 Livingston(1972)およびRMS要件(NASA / JSC、1975)のコンテキストでそれを読むことによって強化できます。
^ 運転要件のトピックの検索と識別を含むと予測されるミッションの割合については、 Livingston(1972)の図1と図2をそれぞれ参照してほぼゼロの接触速度への言及は、スペースシャトルランデブーの歴史(Goodman、2011)、69ページからです。RMSへの展開と検索の割り当て: Jorgensen&Bains(2011) 1ページ。
^ 関連するRMS要件は、 RMS要件(NASA / JSC、1975)の12ページに記載されています。CBMアライメントコリドーの入口のサイズと形状に関する洞察については、44ページの「前哨基地の運用(Dempsey、2018)」を参照してサービスが開始されると、SRMSの変更は進化する状況に対処するのに役立ちました。参照ヨルゲンセン&バン(2011) 8ページ。SRMSが重いペイロードを処理できるようにする新しいソフトウェア(位置-方向保持サブモード)の開発については、15〜20ページで説明しています。RMSを使用するときに、嵌合オブジェクト間の位置合わせ(ACBMとPCBM位置合わせガイド間の接触など)を達成するための押し込みの可能性については、同じドキュメントの22ページの「力モーメント調整」の説明を参照してこれらの変更はCBMの開発とほぼ同時に発生していたため、多くの新機能が登場しました。
^ SRMSの最初の使用: Jorgensen&Bains(2011) 6ページ。宇宙ステーションのニーズ、属性、および建築オプションの調査に関する多くの請負業者のレポートは、NASAテクニカルレポートサーバー(NTRS)の検索機能を使用して見つかります。段階。レポートでは正式には「フェーズA」の調査とは呼ばれていませんが、フェーズBが続きました( NASAの開発フェーズの現在の定義については、 NASA SEハンドブック(Hirshorn、Voss&Bromley、2017年)の第3章を参照してください)。プログラム)。プログラムの初期段階で「停泊」の単一の定義が理解されていたことは、報告からは明らかではありません。時代の定義と今日の定義の違いは明らかです。たとえば、 Cohen、Eichold&Heers(ed。)(1987)の4ページ(pdf 9ページ):「ドッキングと停泊の違いは、ドッキングがモジュールとハブの間、またはモジュールとモジュールの間で停泊中のシャトルと宇宙ステーション」。他の定義は、その日のプログラムの文献に記載されており、その多くはNTRSにアーカイブされています。
^ フランジ適合荷重:Illi(1992) 5ページ(pdfページ付け)を参照してこの論文は「初期」でしたが、CBM / PE ICD(NASA / ISSP、2005) §3.2.1.1およびZipayらの12ページと42ページの言及に示されているたわみ。al。(2012)は、特にラジアルポートでのたわみが、最終的な検証活動を通じて問題として残っていることを示しています。定性的な内部荷重は、構造設計要件(NASA / SSPO、2000)で要求されたプリロードボルト基準(NASA / NSTS、1998)、§3.5.5(つまり、ACBMDev。Spec。(BD&SG、1998)セクション3.3.1.3.3によって呼び出されます。限界圧力はPCBMDevで指定されています。スペック (BD&SG、1998)、§3.2.5.2。モジュール圧力シェルと同様に、結合されたCBMによって作成された前庭は、22.8 psigでプルーフテストされました(Zipay、et。al。(2012)page10)。
^ 宇宙ステーションプログラム。説明(NASA / HQ、1984) 344ページ。このレポートではRMSについては言及され停泊は、現在一般的にドッキングのみに関連付けられている推進操作(一方で)とテレロボティックマニピュレーターの使用(他方)を区別せずに定義されます。また、このドキュメントでは、ハッチを接岸メカニズムの一部として参照していますが、最終的な宇宙ステーションアーキテクチャでは、ハッチのない場所にCBMがマルチバースアダプタについては、240〜241ページで説明しています。同じドキュメントの他の場所では、アダプタは「アセンブリおよびバースモジュール」と呼ばれているように見えます(例:429ページ)。停泊メカニズムの共通性について:「人間が居住できるモジュールは、共通のインターフェースと停泊メカニズムを備えている必要が」(323ページ)。「同一の停泊システム」の両性具有は、462ページで検討されています(プログラムの説明のすべてのページ番号は、レポートの複数のボリュームを1つのファイルにバンドルするpdfページ番号に準拠しています。) ^ この期間中に開発された飛行支援構造メカニズムの詳細な説明については、 Leavy(1982)を参照してエンジニアリングと運用の実践の多くは、CBMに関する後のドキュメントに反映されています。
^ 宇宙ステーションプログラム。説明(NASA / HQ、1984) 516ページ(pdfページネーション)。
^ 実際の開始日はAdvからです。開発者 最終報告書(Cntrl。Dyn。&MDA、1998) p。74(pdfページの76)。停泊/ドッキングメカニズムの説明は、 Burns、Price&Buchanan(1988)の2〜9ページ(pdfページ付け)に要約されています。全体の直径は、後者のリファレンスの図8から導き出されます。この図には、当時の設計コンセプトの他のいくつかの図が含まれています。
^ リソースノードの小さなCBMリングの直径、ボルト穴、および外向きのガイドは、前年度の高度な開発レポートに示されているものと同じです。Burns、Price&Buchanan(1988)を参照して ^ 「ボルト/ナット構造ラッチ」は、 Burns、Price&Buchanan(1988) pp 331 – 333(pdfページの7 – 9ページ)に記載されています。この用語の由来は不明です。同じ出典の3ページにある一般的な要件では、これらを単に「ラッチ」と呼んでいます。宇宙産業のための潤滑ハンドブック(NASA / MSFC、1985)は、潤滑に関するその時間枠でのMSFCの主要な文書であり、二硫化タングステンを管理する標準であるDicroniteまたはDOD-L-85645を明示的に識別しハンドブックには、そのような潤滑剤がいくつか記載されており、空気中での摩擦係数が約0.04であると説明されていますが、真空用途の値は示され摩擦の変動が重要な部分であるトルクと前負荷の不確実性との関係の重要性は、CBMの開発中にその後必要とされた前負荷ボルト基準(NASA / NSTS、1998)から明らかです。
^ ベローズのばね定数テストの結果については、 Adv。開発者 最終報告書(Cntrl。Dyn。&MDA、1998)9〜15ページ(PDFページの11〜17ページ)。一般に、高度な開発プログラムは、ドッキングとモジュールの「ループ」を閉じることに焦点を当てており、停泊操作自体に関するレポートは比較的少ないです。Illi(1992)は、7ページ(pdfページネーション)で、当時、ベローズを確実に製造できなかったと報告しています。
^ 内部ユーティリティの収容: Burns、Price&Buchanan(1988)図8.包括的な、しかし必ずしも決定的なものではない、その日のステーション構成の例については、 Space Station SE&I、Vol。2(BAC / SSP、1987)。まだ時間で研究されている資源ノード(「ハブ」)構成の品揃えについては、コーエン、Eichold&Heers(編)(1987)頁19-22、30-31、33-34、40-41、44 、および75-76(すべてpdfページで)。ラジアルポートの多数の軌道上の写真は、互換性が制限される可能性を示しています。
^ この期間のドキュメントには、特定のモジュール設計戦略に関する最も初期の議論が含まれていますが、高度な開発プログラムの開始近くに、名目上正方形の50インチ(1.27 m)のハッチの駆動要件が明らかに存在していました。参照バーンズ、価格&ブキャナン(1988) 3ページ(PDF)を。ハッチのサイズは1984年まで未定義でした(宇宙ステーションプログラムの説明(NASA / HQ、1984) pdfページ462)。「4象限」レイアウトは、 Hopson、Aaron&Grant(1990) pp 5 – 6で説明されています。ペイロードベイの「動的エンベロープ」は、ペイロードベイユーザーガイド(NASA / NSTS、2011)の§5.1.2.1で説明されています。 )。CBM / PE ICD(NASA / ISSP、2005)、§3.1.4モジュール間の「ユーティリティ・ジャンパー」のジオメトリの詳細な割り当てを含み、注意深くCBM / CBM界面の両側のコンポーネントの動的クリアランスエンベロープを管理します停泊中。
^ モジュールの寿命は、 Hopson、Aaron&Grant(1990) p。6. 10年の寿命の最終的な要件(ACBMDev。Spec。(BD&SG、1998)の§3.2.3.1)との調整は、入手可能なドキュメントからは不明確です。標準ラックの形状については、以前のリファレンスの16ページの図13を参照してモジュールの打ち上げ重量を調整するための便利な手段として使用されている事前統合ラックの初期の議論は、 Troutman、et。al。(NASA / LaRC、1993)、25ページ(pdfページネーション)、大統領へのSSRT最終報告書(NASA / SSRT、1993)、13ページ、および再設計レポート(NASA / SSRT、1993)(pdfページネーション)の59ページ。軌道傾斜角の増加に伴うシャトルペイロード能力の変化の要約は、後者の参考文献の39ページに ^ 明確な停泊およびドッキングメカニズムは、 Hopson、Aaron&Grant(1990)の13〜15ページで参照されています。提案された共通モジュールの概念がモジュールのサイズと打ち上げ重量に与える影響の詳細な分析については、 Gould、Heck&Mazanek(1991)を参照して1992年までに選択されたベースラインリソースノードの簡単な説明は、 Winch&Gonzalez-Vallejo(1992)およびIlli(1992)の紹介にIlli(pdfページネーションの3ページと5ページ)は、CBMの設計に対する圧力によるたわみの影響をさらに明確に認識しています。「パッシブフレキシブルCBM」は、ウィンチ(pdfページ7)で確実であるかのように議論されましたが、その後まもなくイリ(pdfページ7)で効果的に延期されました。そのようなバリアントが認定または製造されたという記録は見つかりませんでした。また、モジュールパターンがループに「閉じられた」ことはありません。
^ システムエンジニアリングドキュメントのリリース日は、PCBMDevのiiページからです。スペック (BD&SG、1998)、CBM / PE ICDのページii (NASA / ISSP、2005)、およびACBMDevのページi 。スペック (BD&SG、1998)。
^ これらのパッセージには、この時期の2つの主要な情報源であるWinch&Gonzalez-Vallejo(1992)とIlli(1992)にほとんど共通する資料が含まれています。せん断タイへの参照を除いて、設計の説明はウィンチの3〜7ページ(pdfページ付け)に従います。当時、デザインは急速に変化していた可能性がウィンチと同じ年に出版されたイリは、柔軟な変形が廃棄されたと説明し、CBM / PEジョイントがウィンチのOリングではなく溶接でシールされていると説明しています。Illiだけがシアータイについて言及しています(pdfページの2ページ)。Winchの説明には、CBM / CBMインターフェイスプレーン全体にそのような負荷を運ぶための明確な方法が含まれシャータイの設計は、アライメントガイドよりもタイトなアライメントの最終段階を効果的に提供するものとしてIlliによって認められています。Illi図4のPCBMアライメントガイドは、ウィンチ図3および4に見られるスパンの半分しかありません。Illiは、この変更を軽量化対策として説明しています。Illiは、ボルトのトルクがどちらの場合も900lb⋅in(100,000mN⋅m)と報告されているにもかかわらず、Winchの6,500 lbf(29,000 N)と比較して、ボルトの予荷重を9,500 lbf(42,000 N)と報告しています(ねじ潤滑の変更が行われた可能性があります)。WinchはCBM / CBMインターフェースでOリングを報告し、IlliはEVAの交換を容易にするためにセグメント化されたGask-O-Sealを報告します。そのような交換が軌道上でこれまでに発生したことを示す記録は見つかりませんでした。
^ 宇宙ステーションの自由プログラムに対する議会の支援の要約は、証言から下院科学委員会までです(Smith、2001)。コストの数値は、そのリファレンスの付録1、表1からのものです。異なる推定値は必ずしも同じ範囲または同じ推定手順を反映しているとは限らないため、ソースはそれらを解釈する際に注意を促します。ゴールディン氏のNASAへの方向性については、再設計レポート(NASA / SSRT、1993)の付録Bを参照して ^ 2つの軌道傾斜角は、ステーションの設計と機能の両方に大きな影響を及ぼしました。参照してください再設計報告書(NASA / SSRT、1993)、「共通オプションに関する注意事項」、33ページ(PDFのページネーション)から始まります。構造/機械サブシステムを含めるための推奨事項は、293ページの付録D(pdfページネーション)に記載されています。CBMの負荷の増加は、270ページの2つのオプションについて報告されています(pdfページネーション)。他の問題は特定されていないようです。ただし、レポートでは、51.6度の傾斜により、元の28.5度(pdfページの55ページ)と比較して、「日光の時間」が大幅に長くなることが示されています。コントローラー、モーター、およびラッチの取り外しは、157ページ(pdfページネーション)で確認されました(単一のオプションのみ)。他のオプションについては明示的に推奨されていませんが、その概念は飛行として設計に存在します。前庭ボリュームの活用の増加:再設計チームのレポートの221ページ(pdfページ付け)を参照して ^ STS-74ミッションレポート(Fricke、1996) p。4:「ドッキングモジュールが組み付けられ、オービターから固定されていませんでした…次に、ODSキャプチャリングの12インチ上にあるプレインストール位置に移動されました… 5インチ以内に操作されました捕獲を強制するように設計された推進シーケンスに備えてODSリング。6つの反応制御サブシステム(RCS)のダウンファイアスラスターが発射され、捕獲が達成されました。」ODS( Orbiter Docking System)は、シャトルのペイロードベイに取り付けられた加圧モジュールでした。アンアンドロジナスドッキング機構オービターの後部ハッチ反対側の端にありました。
^ 統合されたプログラムの初期段階について: 1994年の大統領報告(NASA / HQ、1995)、2ページ。宇宙ステーションが「宇宙ステーションアルファ」と呼ばれる暫定期間がありました(134ページを参照)。 )。レポートは、プログラムの適切な名前の一部として「国際的」を大文字にしない(たとえば、1、2、および9ページ)。これは、レポートが作成されたときにプログラムがまだ流動的であったことを示唆している。確定については、1997年の大統領報告(NASA / HQ、1998)、2ページを参照してCBMシミュレーターの配信については、1995年の大統領報告(NASA / HQ、1996)、28ページ(PDFページの33)を参照して )。2つのICD部分の関係は、 CBM / PE ICD(NASA / ISSP、2005)自体の§1.1「目的」で定義されています。
^ CBM認定プロジェクトは、9つの利用可能な情報源によって議論されています。Foster、Cook、Smudde&Henry(2004)およびAssemblyQual。テストレポート(BD&SG、1998)は両方とも概要を提供し、レポートははるかに広範囲です。Zipay、et。al。(2012)、 Hall、Slone&Tobbe(2006)、 Environmental Test Requirements(NASA / ISSP、2003)(SSP 41172)、 Boeing Thermal Balance Report(BD&SG、1997)、 CBM Test Final Report(AEDC、1996)、 CBMボルト/ナットQUAL。テストレポート(BD&SG、1998)およびSmith、et。al。(2020)すべてが特定の側面について議論します。ZipayとFosterの両方が、構造物のプログラムレベルの要件文書( Fracture Control Requirements(NASA / SSPO 2001)およびStructural Design Requirements(NASA / SSPO、2000))の監督者として署名し、Fosterは謝辞に記載されています。以下のためIlli(1992)、2つのテスト報告書の信憑性が正式に開発請負業者によって認定され、SSP 41172は、検証の要件については、プログラム・レベルの文書であり、およびMSFC / CDLと教訓論文はNASAエンジニアリングスタッフによって作成されています。残念ながら、情報源はすべての資格の詳細について完全に一致しているわけではないようです。ここでの議論は、正式にリリースされたテストレポートに従います。
^ リストされているコンポーネントは、 Foster、Cook、Smudde&Henry(2004) pに基づいています。304. ACBMリストは、タイプIのみを考慮しているように見えます。タイプIIに固有のメカニズムについては言及されておらず、それらのコンポーネントレベルの資格については他の入手可能な情報源に記載されPCBMの熱スタンドオフも、Foster、Cook、Smudde&Henry(2004)のリストには記載されていませんが、「スプリング式」と記載されています。ムービングメカニカルアセンブリ(MMA)に必要なコンポーネント認定テストの包括的なリストについては、環境テスト要件(NASA / ISSP、2003)の表4-1を参照して ^ センサーおよび/またはアクチュエーターが組み込まれているため、CBMの可動機械アセンブリの一部は、コントローラーパネルアセンブリと同様に電子/電気機器でも ^ 動力付きボルト/ナットテストは、 CBMボルト/ナット品質から要約されています。テストレポート(BD&SG、1998年)。静的負荷テストは、軌道上で結合されたときの負荷状態に対処しました。動的負荷試験は、PMAの現場打ち条件に対処しました(§8-1)。環境テスト要件(NASA / ISSP、2003)(SSP 41172)でも指定されている寿命(耐久性)および熱真空テストは、ALQTセットアップで実施されました。 技術的に有効なサイクルには、部分的なプリロードでの反復的なロード/アンロードサイクルが含まれます」(12-6ページ)。テストのリストは、レポートの§2-1からのものです。SSP 41172は、テストのリビジョンBであるとレポートに記載されているため、詳細の一部は、現在利用可能なリビジョンと正確に比較できない場合が ^ ACBMDevのセクション4。スペック (BD&SG、1998)およびPCBMDev。スペック (BD&SG、1998)。
^ ACBMDev。スペック (BD&SG、1998) §4.3.2.1.2.4.1。
^ キャプチャダイナミクス: ACBMDev。スペック (BD&SG、1998) §4.3.2.1.2.4.1。ACBM / PCBMインターフェース平面での要素レベルのテスト、剛性化、および前庭荷重による圧力誘起たわみモデルの検証:§4.3.2.1.3.2。両側間のシールの検証と関連するデモンストレーションについては、 PCBMDevを参照してスペック (BD&SG、1998) §4.3.2.1.4.2。
^ によると、ボーイングの熱収支報告書(BD&SG、1997) 7.6、整列ガイドの材料は、チタンに2219アルミニウムから変更されましたが、この変更は遅すぎるテストに含めることが起こりました。レポートに示されている展開可能なカバーは、フライトデザインのカバーと表面的に類似しているだけです。ペリフェラルバンパーは、テストレポートの図にも、本文にも記載され「ドックの最初のハードウェア」の日付はレポート§1.4からのものであり、試験品の製造リードタイムを考慮して大幅に早い設計締切日を示唆しています。Freedomとの違いの要約は、 Winch&Gonzalez-Vallejo(1992)およびIlli(1992)の詳細な数値とテストレポートの数値の比較に依存しています。まだ飛行構成になっていない項目の要約は、この図とCBMの多くの飛行写真との比較に依存しています。
^ CBMのキャプチャ/接触動的分析で見つかった最も早い日付はSearle(1993)であり、1993年に公開されましたが、1992年7月の日付です。§5の要約では、「… 3〜4か月分析作業は1991年後半または1992年初頭に開始されたことを示唆しています。CBMをサポートするMSFCのシミュレーターへのRMSモデルの組み込みについては、テストベッド数学モデル最終報告書(Cntrl。Dyn。、1993)も参照してモデル検証テストの開始日を表明します。「ソフト制約の方法」は、 Hall、Slone&Tobbe(2006)、p。pdfページの5。この情報源は、MSFC施設を「… CBM開発および認定テストプログラムをサポートするために1990年代を通じて独占的に使用された」と説明していますが、 AssemblyQualの§3.2に要約されています。テストレポート(BD&SG、1998)は、先行活動が「… 5年間…」であると説明しており、1997年のいつかまでに完了したことを示唆しています。Hall(2006)は、施設が乗組員の訓練に使用されたと主張しています。ミッションサポートは、少なくとも2000年のSTS-92の軌道上でのCBMの最初の使用にまで及んでいたでしょう。また、テスト施設のCBMを示す低解像度のグラフィックも含まれています。このソースには、モデル化されたままの連絡先ペア、ガイド/ガイド連絡先の言及は省略されています。「ダックヘッドバンパー」および「負荷減衰システム」(図3)という用語の由来は不明です。用語は他の場所にはありませんが、その使用法は明らかです。「ロングリーチキャプチャラッチおよびフック」という用語は、数年前に同じ施設での高度な開発テストの特定の側面を説明するためにBurns、Price&Buchanan(1988)によって使用された用語を反映しています。他の情報源のCBMに関しては見つかりませんでした。抵抗負荷システムの説明は、ALQTR§5からのものです。正面図は、 Foster、Cook、Smudde&Henry(2004)図4に示されています。
^ Zipay、et。al。(2012)(pdfページのp。42)は、SRMSとSSRMSがアセンブリレベルのテストでシミュレートされ、Man-in-the-Loopアクティビティが含まれていると主張しています。アセンブリQUAL。テストレポート(BD&SG、1998)は、付録F(「CBMキャプチャダイナミクステストデータ分析、ALQTフェーズBおよびC」)で別の方法でレポートします。テストの抵抗負荷システムは、「… 6ジョイントのブレーキオン」フレキシブルSRMSモデルに置き換わるものです。 …同等の6×6の剛性と減衰マトリックスおよび6つの荷重スリップパラメータを使用」。明らかな不一致の調整は、入手可能な情報源では明白に見えませんでした。
^ アセンブリ品質。テストレポート(BD&SG、1998)、セクション3.2は、ボーイングサーマルバランスレポート(BD&SG、1997)で報告されているように、仕様温度がサーマルバランステストに基づく分析によって導き出されたことに関連しています。後者の§2.1によると、テストは「… ASTM E 491-73(1980)…セクション5.5.1の一般的なガイダンスの下で計画されました」[少し後の熱平衡テストの標準プラクティス(ASTMを参照) 、1984)、1973年以降更新されておらず、「…主要なインターフェースで接触コンダクタンスを確立するサブスケールテストの後に… CBM検証計画に組み込まれました…」。標準モデリングツールのチェーンは§7.1で説明されています。より簡単に入手できるCBMテスト最終報告書(AEDC、1996)は、試験のセットアップと結果を説明および要約していますが、軌道上では実際には得られない定常状態への温度安定化(実験の不確実性の範囲内)のみを報告します。
^ 組み立てQUAL。テストレポート(BD&SG、1998) §2.2.3では、真空チャンバー内で冷却する手法として、直接LN 2注入について説明しています。これにより、チャンバー圧力を12.52キロパスカル(93.9 Torr)の三重点未満に維持しながら液体窒素をテスト物品に直接噴霧します。 。窒素は、デリバリーシステムから排出されるとペレット化し、試験品に付着します。その後の昇華は、物品から熱エネルギーを抽出します。§3.2は、この方法論が火星パスファインダーのテストのためにJPLによって発明され、一連の専用フィクスチャ開発テストを通じてCBMテスト用に改良されたことを報告しています。それは「… 27,000ポンドのアクティブテストフィクスチャのクリティカルセクションを3時間以内に100F冷却することができました…」でした。
^ ラジアルポートの再設計は、 ISSコスト評価および検証タスクフォースレポート(Chabrow、Jay W.、ed。(1998)(p。19)のより大きなプログラムコンテキストに要約されています。特定の側面については、pp。 12-18 Zipay、ら。(2012) 、およびスミスら。(2020)、§V。APV及びPPV記述からであるアセンブリQUAL。テストレポート(BD&SG、1998)(§§2.2及び3.3 )、これは、コマンドのローテーションが評価されているシールの問題に影響を与えなかったことを報告し続けます。
^ 組み立てQUAL。テストレポート(BD&SG、1998)は、§5.4で、当初計画された温度を実際に達成することができず、両側で約10°F(5.6°C)を逃したと述べています。フィクスチャの熱制御システム(直接LN 2注入および「ストリップ」ヒーター)は、本来の目的の温度に到達して他の温度に近接して保持するには不十分な権限を持っていることが判明しました(つまり、ヒーターが低温側を過度に暖め、スプレー高温側を冷却しすぎた)。この問題は合理的な努力で解決できず、元のテストの目的はフィクスチャの容量に合わせて緩和されました。また、抵抗負荷システムの負荷制限は、極端な初期位置で実行されたときに超過し、自己保存で実行を中止しました。この問題は、新しいCBM操作手順の開発に直接つながり、デモンストレーションを進めることができました。
^ セットアップとテストのタイミングと順序は、 AssemblyQualからのものです。テストレポート(BD&SG、1998) §4.1。結果の簡単な要約は、同じレポートの§§4および5からのものです。テスト中に修正された統合の問題には、ボルトとエグゼクティブソフトウェアの間、M / DカバーとRTLの間、M / Dカバーとラッチの間、およびRTLとラッチの間のコマンドインターフェイスが含まれます。
^ 追加のテストは、 AssemblyQualの表2-1からのものです。テストレポート(BD&SG、1998) 2-8ページ。フライトサポートについては、 V20(NASA / MSFC、nd)を参照して ^ ノード3の方向への変更の影響を説明する直接の引用は、 Link&Williams(2009)の6ページからのものです。リファレンスには、影響を受ける領域のエンジニアリンググラフィックと設計どおりのインストールが含まれています。また、新しい設計を推進した分析アプローチについても簡単に説明します。EVAのインストールに関する詳細なビデオも参照して ^ 示されているたわみは、 CBM / PE ICD(NASA / ISSP、2005) §§3.2.1.1からのものです。これらは、より容易に入手できるGualtieri、Rubino&Itta(1998)の図7のものと一致しますが、後者の参照では、ICDに見られるローカルの面外要件(任意の7.5度のスパン)が省略されています。
^ 大気圧のリークパスの特定は、Underwood&Lvovsky(2007)の詳細な説明、4A Maintenance Book(NASA / MOD、2000)の軌道上リークピンポイント手順、§§1.3.502に基づいています。 504および同じ文書の§§1.2.518–520のIVAシールの取り付け手順。リークパスは、IVAシールキットのコンポーネントでシールできます。
^ ボルトの材質、サイズ、ねじ形状: Illi(1992)。ナットの材質と潤滑: Sievers&Warden(2010)。
^ ソースは、プリロード値に関して正確に一致しIlli(1992)は「少なくとも9500 lbf」を使用していますが、期間が早いため、おそらく割引される可能性がSievers&Warden(2010)は、「約19000lbf」と引用しています。McLaughlin&Warr(2001)は、 CBMボルト/ナット品質と同様に19,300 lbf(85,900 N)を引用しています。テストレポート(BD&SG、1998年)。NASAのフライトディレクターによって書かれた前哨基地の運用(Dempsey、2018)は、20,230 lbf(90,000 N)の前負荷を識別します。これは、ボルトが当初の認定方法とは異なる方法で運用されていることを示している可能性が明らかな不一致の解決は、文献から明らかではありません。ここでは資格値が使用され、明示的にそのように呼ばれます。公称ボルトアクチュエータ出力はMcLaughlinからのものです。ばね荷重の熱スタンドオフ: Foster、Cook、Smudde&Henry(2004)。熱膨張係数の差の影響は、接合部の材料の違いを考えると、物理学の単純な問題です。
^ IVAシールキャップ保護: CBM / PE ICD(NASA / ISSP、2005)図3.1.4.1-2および4Aメンテナンスブック(NASA / MOD、2000)、119ページ(pdfページ付け)、図7.リークチェックポート:ICD図3.3.5.1-1および-3; それらは、 Illi(1992)およびWinch&Gonzalez-Vallejo(1992)で説明されている圧力トランスデューサを機能的に置き換えたようです。アースストラップ:ICD図3.3.10-9。ポートタイプを識別するための閉じ括弧:ICD図3.3.81、-2との比較。リングの内側の放射状面のIVAシールカバー: 4Aメンテナンスブック(NASA / MOD、2000)、122ページ(pdfページ付け)、図10。参照寸法はICD図3.3.4.3-1からのものです。
^ 内部コンポーネントの識別は、Foster、Cook、Smudde&Henry(2004)の図3に記載されています。これは、 AssemblyQualの図2-1と同じです。テストレポート(BD&SG、1998年)。参照寸法は、 CBM / PE ICD(NASA / ISSP、2005)からのものです。図3.1.4.1-17。
^ PCBMおよびACBMリングID、取り付けボルトのパターン、公差、およびインデックスピン:CBM / PE ICD(NASA / ISSP、2005)図3.3.2.1-1(ACBM)および-2(PCBM)。CBM / CBMシールを取り付ける前のPCBMリングの外側の面の適度な解像度の写真は、STS-124 EVA Cklist(NASA / MOD、2008)の72ページ(pdfページ付け)に ^ CPAボルトパターンはCBM / PE ICDからのものです(NASA / ISSP、2005)図3.3.4.3.1-1および2. CBM / PEフランジをスカラップする理由は同じICDからのものです(図3.1.4.2-)。 6.6。また、ACBMのこの領域の多くの軌道上の写真から推測することもできます。スタンドオフブラケットの識別: STS-126 / FD13実行パッケージ。(NASA / MCC、2008)、37ページ(pdfページネーション)、図3。
^ CBM / PE ICD(NASA / ISSP、2005) §3.3.2.1。
^ ビーズ間のリークチェックホールを含むCBM / CBMシールの構成については、 Underwood&Lvovsky(2007)の5〜6ページ(pdfページネーション)および図5を参照してシールの基板の厚さは、指定された寸法から計算されます。でCBM / PE ICD(NASA / ISSP、2005)図3.1.4.1-17。シールビードの高さは、 ISS /シャトルジョイントオペレーションの図2の525ページ(pdfページネーション)に記載されています。(LF1)(NASA / MOD、2005)。基準寸法は、ICDの図3.1.4.1-8および3.3.10.1-1から計算されます。
^ いくつかの参考文献では、アライメントガイドを「粗いアライメントガイド」と呼んでいます。同様に、アライメントピンはいくつかの参照で「ファインアライメントピン」と呼ばれます。アラインメントの段階間のハンドオフ: Foster、Cook、Smudde&Henry(2004)pp303-304。ACBMのバンパーとアライメントピンは、 CBM / PE ICDによって呼び出されます(NASA / ISSP、2005)。図3.3.10-4。キャプチャラッチと最終調整の関係については、 Cook、Aksamentov、Hoffman&Bruner(2011)の27ページ(pdfページネーション)を参照してアラインメントピンによって運ばれるせん断とねじれ: Foster、Cook、Smudde&Henry(2004) p。304.参照寸法はICD図3.3.10-6.1からのものです。
^ PCBM内のキャプチャラッチスイープ用に予約されたエンベロープは、 CBM / PE ICD(NASA / ISSP、2005)の図3.1.4.1-17に記載されています。リングがハードメイトにあるとき、それはキャプチャフィッティングの上部をわずかに超えて伸びます。今後のPCBMアライメントガイドによるReady-to-Latchインジケーターの作動は、 Brain(2017)に基づいています。参照寸法は、ICDの図3.1.4.1-22からのものです。
^ 右側の図を詳しく見ると、キャプチャアームを保持しているキャプチャラッチの発射拘束フックが示されています。STS-123 EVA Cklist(NASA / MOD、2008)の313ページの注釈(pdfページ付け)も参照してCPAに戻る接続は、 McLaughlin&Warr(2001)の図8で説明されているとおりです。参照寸法は、 CBM / PE ICD(NASA / ISSP、2005)の図3.1.4.1-13からのものです。
^ 文献では、キャプチャラッチアセンブリとその部品にいくつかの異なる命名法を使用しています。Searle(1993)はラッチを「5バー」メカニズムと呼んでいますが、同時期のIlli(1992)はそれを「4バー」と呼んでいます。後の用語は、従来の定義と一致するため、ここで使用されます。ここでは「Dogleg」が使用されています。これは、画像ソースがそれを参照する方法であるためですが、多くのソースでは「idler」という用語が使用されています。画像ソースは複数形のフォロワーを参照していますが、ラッチの軌道上の写真の多くは、2つの側面を持つ単一のメンバーとしてそれを明確に示しています。キャプチャラッチスイッチへの参照と、それが動作でどのように使用されるかは、いくつかの場所で見つけることができます。たとえば、「ラボCBMコントローラーエラー-メイトの誤動作の準備」解決フローのブロック2(PDFページの58ページを参照)。 5Aアセンブリの誤動作(NASA / MOD、2000))。アクチュエータ自体は、 McLaughlin&Warr(2001)に(物理的および機能的に)説明されています。発射フックの機能は、 STS-120 EVA Cklist(NASA / MOD、2007)の338ページ(pdf)に記載されています。
^ Ready-to-Latchインジケーターとキャプチャラッチの物理的および操作上の関係については、 3A Assembly Ops(NASA / MOD、2000)、212ページ(pdfページネーション)を参照して ^ この高度なトレーニングシミュレーションには、ラッチ/フィッティング、ガイド/ガイド、スタンドオフ/ストライクプレート、およびバンパー/バンパーコンタクトが含まれます。これは、MSFCで作成された非リアルタイムで忠実度の高いCBMモデルに対して検証されました。Brain(2017)を参照して ^ ハウジングの近端の開口部から見えるドライブスリーブの11ポイントのソケットは、 McLaughlin&Warr(2001)の図6および7のアクチュエータの嵌合機能と比較できます。参照寸法は、 CBM / PE ICD(NASA / ISSP、2005)からのものです。図3.3.10-3。
^ パワードボルトの上部部品の取り外しについては、 4Aメンテナンスブック(NASA / MOD、2000)のセクション1.2.520に、いくつかの追加の写真と線画とともに記載されています。
^ 4Aメンテナンスブック(NASA / MOD、2000)、§1.2.514– 1.2.516(pdfページ80 – 93)、組み立てられたボルトなしの状態については、 Sievers&Warden(2010)の図1を参照してナットがボルトのシャフトとずれています(PCBMリングの穴でもずれています)。Sieversはまた、論文の要約ではナットを「自己整合」と呼んでいます。カプセル化されたナットは、メンテナンス手順では「ナットバレル」と呼ばれます。ここで使用されている命名法は、Sievers&Wardenの命名法に従います。同様に、Castellated Nutは、メンテナンスブックでは「コンティンジェンシーナット」と呼ばれていますが、ここでの用語は業界でより一般的に使用されています。減圧せずにボルト/ナットを交換する機能への言及は、環境試験要件(NASA / ISSP、2003)付録Cの「 15/16」ステートメントによってサポートされています。この状態は、軌道上で少なくとも1回発生しています。DSR–を参照して 2017年6月12日(NASA / HQ、2017年)。
^ CPAの一般的な説明は、 McLaughlin&Warr(2001)に基づいています。コントローラの一般的な使用法については、環境テスト要件(NASA / ISSP、2003)のC-24ページ(PDFページの408ページ)を参照して ^ 各ACBMのCPAの補足については、 McLaughlin&Warr(2001)を参照して ^ 画像ソース( STS-120 / FD04 Execute Pkg。(NASA / MCC、2007))には、打ち上げ時にフラップを閉じたままにする方法の詳細も示されています。表紙の多くの飛行写真は、さまざまな構成を示す国立公文書館カタログに展開可能な花びらアクチュエータスプリングへの参照は、 STS-123 EVA Cklist(NASA / MOD、2008)(pdfページネーション)の323ページのEVAタスクデータから来ています。参照寸法は、 CBM / PE ICD(NASA / ISSP、2005)の図3.1.4.1-19からのものです。
^ ラベルと説明は、 STS-126 / FD13 ExecutePkgからのものです。(NASA / MCC、2008) pp。35–42。カバーの多くの機能はここで簡単に見ることができます ^ 写真の電動ボルト、アクチュエータ、カラー、およびケーブルの識別は、 4Aメンテナンスブック(NASA / MOD、2000)の85ページと91ページ(pdfページ付け)からのものです。IVAシール土地被覆コンポーネントは、同じドキュメントの122ページ(pdf)に記載されています。クレビスと展開可能な花びらの発射ロックの関係は、 STS-123 EVA Cklist(NASA / MOD、2008)、256〜260ページ(pdf)に記載されています。
^ 各花びらの発射ロックの補足は、 STS-123 EVA Cklist(NASA / MOD、2008)、131ページのノード2ポートおよび直下CBMのEVA「先取り」の説明を含むいくつかの場所で文書化されています(131ページ) pdfページネーション)。クレビスと展開可能な花びらの発射ロックの関係は、ラッチによるローラーリンクの係合(324ページ)と同様に、同じドキュメントの256〜260ページ(pdf)から得られます。参照寸法は、 CBM / PE ICD(NASA / ISSP、2005)の図3.1.4-7.3から取得されます。
^ PCBMDevのセクション3.2.1.9.1。スペック (BD&SG、1998)は、「…加圧ロジスティクスモジュールの船外活動または船外活動(EVA)の準備」への依存を禁止しました。長期ジョイントの組み立てには、そのような要件は割り当てられPCBMシールから汚染カバーを取り除くことについての議論は、いくつかのEVAチェックリストフライトサプリメント( STS-120 EVA Cklist(NASA / MOD、2007)(pdfページ55)、 STS-122 EVA Cklist(NASA / MOD、2007))( pdf 34ページ)、 STS-123 EVA Cklist(NASA / MOD、2008)(pdfpp。56-70)、およびSTS-124 EVA Cklist(NASA / MOD、2008)( pdfpp。66-72)、すべてこれは永久的な加圧要素ザインストールISS /シャトルジョイントオプスを(LF1)(NASA / MOD、2005)ページ195-199(PDFのページ付け)に物流便中に露出CBM / CBMシール上で実行される大規模な検査を説明し、前回の飛行後にシールで発見された異物の写真による証拠とともに、消耗品の打ち上げ車両が周回するロジスティクス車両の軌道上写真の多くは、SSRMSが取り組む前の裸のCBM / CBMシールを示しています。汚染カバーに加えて、追加のオーバーラップと静的カバーは、恒久的に設置された要素の一部の軸方向ポートで使用されています(たとえば、 Liを参照)nk&Williams(2009) 6ページ)。このようなカバーとCBM仕様の関係は、入手可能なドキュメントからは不明です。
参考文献
レポートおよびその他のディストリビューション
組織の著者と出版社への鍵
AEDC:アーノルド技術開発センター
AIAA:アメリカ航空宇宙学会
ARC:エイムズ研究センター
できるだけ早く:航空宇宙安全諮問委員会
ASTM:米国材料試験協会
BAC / SSP:ボーイング航空宇宙会社/宇宙ステーションプログラム
BD&SG:Boeing Defense&Space Group
ケージ:商業および政府機関
Cntrl。Dyn。:コントロールダイナミクスカンパニー
ESA:欧州宇宙機関
GRC:グレン研究センター
GSFC:ゴダードスペースフライトセンター
本社:本社
ISSP:国際宇宙ステーションプログラム
JPL:ジェット推進研究所
JSC:ジョンソン宇宙センター
LaRC:ラングレー研究所
MCC:ミッションコントロールセンター
MDA:McDonnell Douglas Astronautics Company
MOD:ミッション運用局
MSFC:マーシャル宇宙飛行センター
NSTS:国立宇宙輸送システム
PHC:パーカーハネフィン株式会社
SAE:自動車技術者協会
SSPO:宇宙ステーションプログラムオフィス
SSRT:宇宙ステーション再設計チーム
USGPO:合衆国政府印刷局
AEDC(1996-09-01)。国際宇宙ステーションのパッシブおよびアクティブ共通結合機構熱サイクルテスト (PDF)(テクニカルレポート)。AEDC。AEDC-TSR-96-V4 。
ASTM小委員会E21.07(1984)。「宇宙船の熱平衡試験のための太陽シミュレーションの標準的な実践」。ASTM規格の年次本、第15.03巻:宇宙シミュレーション; 航空宇宙材料; 高弾性繊維および複合材料。ASTM。ASTM E491-73。
BAC / SSP(1987-01-18)。宇宙ステーションシステムエンジニアリングと統合(SEとI)。ボリューム2:調査結果(テクニカルレポート)。BAC / SSP。D483-50115-2 。
BD&SG(1997-02-24)。共通結合機構(CBM)熱平衡発達試験報告書。ケージ3A768。T683-13856-1A。
BD&SG(1998-10-01)。パッシブ共通結合機構クリティカルアイテム開発仕様。ケージ3A768。S683-28943E。
BD&SG(1998-10-07)。アクティブ共通結合機構プライムアイテム開発仕様。ケージ3A768。S683-29902B。
BD&SG(1998-10-08)。共通結合機構アセンブリ認定テストレポート。ケージ3A768。T683-13850-3。
BD&SG(1998-10-12)。共通結合機構の動力付きボルト/ナット認定試験報告書。ケージ3A768。T683-85131-1。
脳、トーマスA。; Kovel、Erik B。; MacLean、John R.&Quiocho、Leslie J.(2017-08-06)。更新:有人宇宙飛行シミュレーションアプリケーションの接触ダイナミクスモデリングの進歩。IDETC / CIE国際設計工学技術会議とコンピュータと工学会議の情報。オハイオ州クリーブランド; 米国:ASME。JSC-CN-39583 。
バーンズ、ジーンC。; 価格、ハロルドA.&ブキャナン、デビッドB.(1988-05-01)。宇宙ステーションの本格的なドッキング/停泊メカニズムの開発。第22回航空宇宙メカニズムシンポジウム。LaRC 。
カーペンター、クリスチャンB.(2004-08-01)。ISSプラズマコンタクタ中空陰極の動作状態について。第40回合同推進会議および展示。AIAA。AIAAペーパー2004-3425 。
Chabrow、Jay W.、ed。(1998-03-25)。NASA諮問委員会への国際宇宙ステーションのコスト評価および検証タスクフォースの報告 (PDF)。NASA / HQ 。
Christensen、John R。; アンダーウッド、スティーブD。; Kamenetzky、Rachel R.&Vaughn、Jason A.(1999-02-01)。シール漏れに対する原子状酸素の影響。第20回宇宙シミュレーション会議:変化するテストパラダイム。NASA / HQ。NASA / CP-1999-208598 。
Cntrl。Dyn。&MDA(1988)。停泊メカニズムの最終テストレポートとプログラム評価、契約NAS8-36417(テクニカルレポート)。MDA。NASA-CR-183554 。
Cntrl。Dyn。(1993)。RMSソフトウェアの概要と操作マニュアル(抜粋)。メカニズムテストベッド数学モデルの変更とシミュレーションのサポートに関する最終レポート、契約NAS8-38771(テクニカルレポート)。NASA / MSFC。pp。22–23。NASA-CR-199826 。
コーエン、マークM。; Eichold、Alice&Heers、Susan、eds。(1987-10-01)。宇宙ステーションヒューマンファクター研究レビュー。ボリューム3:宇宙ステーションの居住性と機能:建築研究。1985年12月3-6日にカリフォルニア州モフェットフィールドで開催されたワークショップ。NASA/ ARC。NASA-CP-2426-VOL-3 。
コンリー、ピーターL.、編 (1998)。宇宙船のメカニズム:成功する設計の要素。ジョン・ワイリー&サンズ社ISBN 0-471-12141-X。
クック、ジョンG。; Aksamentov、ヴァレリー; Hoffman、Thomas&Bruner、Wes(2011-01-01)。ISSインターフェースメカニズムとその遺産。スペース2011。AIAA。JSC-CN-23389 。
ダニエルズ、クリストファーC。; ダンラップ、パトリック; deGroh、Henry C.、III; シュタイネッツ、ブルース; Oswald、Jay&Smith、Ian(2007-10-01)。LIDSドッキングおよび停泊システムシールの概要。2006NASAシール/二次空気システムワークショップ。NASA / GRC。pp。349–371。NASA / CP-2007-214995 / VOL1 。CS1 maint:複数の名前:著者リスト(リンク)
デンプシー、ロバート、編 (2018-04-13)。国際宇宙ステーション–ニューフロンティアでの前哨基地の運営 (PDF)。NASA / JSC。NASA-SP-2017-834 。
フォスター、ロバートM。; クック、ジョンG。; Smudde、Paul R.&Henry、Mark A.(2004-05-01)。宇宙ステーションの停泊メカニズム、地上で交配されたことのない大きな構造物を軌道上に取り付ける。第37回航空宇宙メカニズムシンポジウム。第37回航空宇宙メカニズムシンポジウム。メカニズム教育協会。pp。301–314。NASA / CP-2004-212073 。
Fricke、Robert W.、Jr。(1996-02-01)。STS-74スペースシャトルミッションレポート(テクニカルレポート)。NASA / NSTS。NSTS37404 。CS1 maint:複数の名前:著者リスト(リンク)
ギルモア、デビッドG.、編 (1994)。衛星熱制御ハンドブック。エアロスペースコープレーションプレス。ISBN 1-884989-00-4。
グッドマン、ジョンL.(2011-10-01)。スペースシャトルランデブーの歴史(テクニカルレポート)。NASA / JSC。JSC-63400 Rev.3 。
グールド、マーストンJ。; Heck、Michael L.&Mazanek、Daniel D.(1991-01-01)。宇宙ステーションの自由における一般的な加圧モジュールの利用(テクニカルレポート)。NASA / LaRC。NASA-TM-102779 。
Griffen、Michael D.&French、James R.(1994)。宇宙船の設計。AIAA。ISBN 0-930403-90-8。
Gualtieri、N。; Rubino、S。&Itta、A。(1999-02-01)。「国際宇宙ステーションノード2-構造設計分析と静的試験定義」。宇宙船の構造、材料および機械的試験、1998年11月4〜6日にドイツのブラウンシュヴァイクで開催されたヨーロッパ会議の議事録。ESA。Bibcode:1999ESASP.428..173G。ISBN 9290927127。
ホール、DP; Slone、M。M&Tobbe、PA(2006-01-01)。ドッキングおよび停泊メカニズムのモデリングとテスト。SPIEの国際防衛およびセキュリティシンポジウム。NASA / MSFC 。
ホール、ウィリアムM.(1978-02-01)。シャトル/ LDEF検索操作の概要:Rバーアプローチオプション。NASA / LaRC。NASA-TM-78668 。
Hirshorn、Steven R。; Voss、Linda D.&Bromley、Linda K.(2017-02-17)。NASAシステムエンジニアリングハンドブック。NASA / HQ。NASA-SP-2016-6105R2 。
Holkeboer、David H.、ed。(1993)。真空技術と宇宙シミュレーション。アメリカ物理学協会。ISBN 1-56396-123-7。
ホプソン、ジョージD。; アーロン、ジョン&グラント、リチャードL.(1990-01-01)。宇宙ステーションの自由加圧要素のインテリアデザインプロセス(テクニカルレポート)。NASA / MSFC。NASA-CR-181297 。
イリ、エリック(1992-05-01)。宇宙ステーションの自由共通結合機構。第26回航空宇宙メカニズムシンポジウム。NASA / GSFC。pp。281–296 。
Jorgensen、Glenn&Bains、Elizabeth(2011-09-26)。SRMSの歴史、進化、そして学んだ教訓。AIAAスペース2011会議と博覧会。AIAA。JSC-CN-24512 。
Justh、HL、ed。(2016-10-01)。設計のための自然環境の定義(テクニカルレポート)。NASA / MSFC。NASA / TM-2016-218229 。2020-02-13を取得。
カプラン、マーシャルH.(1975)。現代の宇宙船のダイナミクスと制御。ジョン・ワイリー&サンズ。ISBN 0-471-45703-5。
リービー、ウィリアムA.(1982-05-01)。飛行支援システムのメカニズム。第16回航空宇宙メカニズムシンポジウム。NASA / GSFC。pp。23–44 。
Link、Dwight E.、Jr。&Williams、David E.(2009-01-01)。ノード3要素のインストールとアクティブ化をサポートするための国際宇宙ステーションUSOSの変更。環境システムに関する国際会議(プレプリント)。自動車技術者協会JSC-CN-18269 。CS1 maint:複数の名前:著者リスト(リンク)
リビングストン、ルイE.(1972-03-27)。スペースシャトル用のリモートマニピュレーターシステム。宇宙会議におけるAIAA男の役割。AIAA。土井:10.2514 /6.1972-238。72-238。
McLaughlin、Richard J.&Warr、William H.(2001)。国際宇宙ステーションの共通結合機構(CBM) (PDF)(テクニカルレポート)。SAE。2001-01-2435 。
ミスコビッシュ、R。スコット; マット、ハワード; ウィリアムズ、グラント; Duong、Uy&Thomas、Lisa(2017-08-21)。Bigelow Expandable Activity Module(BEAM)の熱および流体分析 (PDF)。熱および流体分析ワークショップ(TFAWS)2017。NASA/ MSFC。TFAWS2017-PT-04 。
NASA / HQ(1984-03-01)。宇宙ステーションプログラムの説明ドキュメントブック1-7。NASA / HQ。NASA-TM-86652 。
NASA / HQ(1995-01-01)。大統領の航空宇宙報告書(1994年度の活動) (PDF)。USGPO 。
NASA / HQ(1996-01-01)。大統領の航空宇宙報告書(1995年度の活動) (PDF)。USGPO 。
NASA / HQ(1998-01-01)。大統領の航空宇宙報告書(1997年度の活動) (PDF)。USGPO 。
NASA / HQ(2007)。2007年のISSオンオービットステータスアーカイブ (PDF)。NASA / HQ 。
NASA / ISSP(2000-06-22)。構成管理要件国際宇宙ステーションプログラム。NASA / JSC。CiteSeerX10.1.1.120.4680 。_ SSP41170A。
NASA / ISSP(2003-03-28)。資格と受け入れの環境テスト要件 (PDF)。NASA / JSC。SSP41172U。2005-01-23にオリジナル (PDF)からアーカイブされました。
NASA / ISSP(2005-10-25)。加圧要素への共通結合機構インターフェース制御文書パート2。NASA / JSC。SSP41004J。
NASA / ISSP(2015-09-01)。国際宇宙ステーションのリファレンスガイド、Utilization Edition (PDF)。NASA / JSC。NP-2015-05-022-JSC 。
NASA / ISSP(2019-02-07)。SlingShotは、小型衛星の展開とペイロードホスティング機能をテストします。NASA / JSC 。
NASA / JSC(1975-12-15)。要件/定義文書リモートマニピュレータシステム。NASA / JSC。JSC-10633A 。
NASA / MCC(2001-01-26)。STS-102 FD 10オリジナルフライトプラン (PDF)。NASA / JSC。2003-10-13にオリジナル (PDF)からアーカイブされました。
NASA / MCC(2005-08-05)。STS-114 / LF1 FD 11実行パッケージ (PDF)。NASA / JSC 。
NASA / MCC(2007-10-26)。STS-120 / 10A FD 04 Execute Package (PDF)。NASA / JSC 。
NASA / MCC(2008-02-09)。STS-122 / 1E FD03パッケージを実行します。NASA / JSC 。
NASA / MCC(2008-02-11)。STS-122 / 1E FD 05実行パッケージ (PDF)。NASA / JSC 。
NASA / MCC(2008-11-26)。STS-126 / ULF2 FD 13パッケージの実行 (PDF)。NASA / JSC 。
NASA / MCC(2009-08-31)。STS-128 / 17A FD 04 Execute Package (PDF)。NASA / JSC 。
NASA / MCC(2009-09-06)。STS-128 / 17A FD 10実行パッケージ (PDF)。NASA / JSC 。
NASA / MCC(2009-09-07)。STS-128 / 17A FD 11実行パッケージ (PDF)。NASA / JSC 。
NASA / MCC(2010-02-15)。STS-130 / 20A FD 09パッケージの実行 (PDF)。NASA / JSC 。
NASA / MOD(2000-06-13)。国際宇宙ステーション組立地上ハンドブック固有/ ISS-3A (PDF)。NASA / JSC。JSC-48516-3A 。
NASA / MOD(2000-08-16)。国際宇宙ステーション組立操作書/ ISS-5A (PDF)。NASA / JSC。JSC-48502-5A 。
NASA / MOD(2000-08-24)。国際宇宙ステーション複合運用グループアセンブリの誤動作ブック/ ISS-5A (PDF)。NASA / JSC。JSC-48532-5A 。
NASA / MOD(2000-09-21)。国際宇宙ステーション組立操作書/ ISS-3A (PDF)。NASA / JSC。JSC-48502-3A 。
NASA / MOD(2000-11-01)。国際宇宙ステーション多目的補給モジュールブック/ISS-5A.1(PDF )。NASA / JSC。JSC-48533-5A.1 。
NASA / MOD(2000-11-20)。国際宇宙ステーション保守修理グループ(MRG)機内保守書/ ISS-4A (PDF)。NASA / JSC。JSC-48513-4A 。
NASA / MOD(2000-12-19)。国際宇宙ステーションISS /シャトル統合作戦本ISS-5A (PDF)。NASA / JSC。JSC-48503-5A 。
NASA / MOD(2001-04-03)。国際宇宙ステーション組立操作書/ ISS-6A (PDF)。NASA / JSC。JSC-48502-6A 。
NASA / MOD(2004-08-27)。PDRS運用チェックリストSTS-114フライトサプリメント/ベーシック、リビジョンA (PDF)。NASA / JSC。JSC-48040-114 。2019-01-08を取得しました。
NASA / MOD(2005-06-28)。国際宇宙ステーションISS /シャトル統合作戦本/ ISS-LF1 (PDF)。NASA / JSC。JSC-48503(LF1)。
NASA / MOD(2007-10-02)。EVAチェックリストSTS-120フライトサプリメント (PDF)。NASA / JSC。JSC-48024-120 。2020-02-01を取得。
NASA / MOD(2007-11-20)。EVAチェックリストSTS-122フライトサプリメント (PDF)。NASA / JSC。JSC-48024-122 。2020-02-01を取得。
NASA / MOD(2008-02-13)。EVAチェックリストSTS-123フライトサプリメント (PDF)。NASA / JSC。JSC-48024-123 。
NASA / MOD(2008-05-02)。EVAチェックリストSTS-124フライトサプリメント (PDF)。NASA / JSC。JSC-48024-124 。
NASA / MSFC(1985-12-01)。宇宙産業のための潤滑ハンドブック(テクニカルレポート)。NASA / MSFC。NASA-TM-86556 。
NASA / MSFC(nd)。ETF V20 (PDF)。NASA / MSFC 。
NASA / NSTS(1998-07-06)。プリロードボルトのスペースシャトル基準。NASA / JSC。NSTS08307A 。
NASA / NSTS(2011-12-04)。スペースシャトルプログラムペイロードベイペイロードユーザーズガイド。NASA / JSC。NSTS21492 。
NASA / SSPO(2000-09-29)。構造設計および検証要件 (PDF)。NASA / JSC。SSP30559C。2005年1月22日にオリジナル (PDF)からアーカイブされました。
NASA / SSPO(2001-08-24)。宇宙ステーションの破壊制御要件 (PDF)。NASA / JSC。SSP30558C。2006年1月5日にオリジナル (PDF)からアーカイブされました。
NASA / SSRT(1993-06-10)。宇宙ステーション再設計チームの社長への最終報告(テクニカルレポート)。NASA / HQ。NASA-TM-108760 。
NASA / SSRT(1993-06-16)。宇宙ステーションの再設計に関する諮問委員会への宇宙ステーション再設計チームの最終報告(技術報告)。NASA / HQ。NASA-TM-109241 。
Oravec、Heather Ann; Daniels、Christopher C.&Mather、Janice L.(2017-06-30)。宇宙飛行ハードウェアの空気漏れ率検証のための試験方法の検証。ASME2017流体工学サマーミーティング。私のように。GRC-E-DAA-TN38694 。
PHC(2010)。Gask-O-Sealおよび一体型シール設計ハンドブック (PDF)。PHC。CSS5124 。
PHC(2018)。パーカーOリングハンドブック(50周年記念版) (PDF)。PHC。ORD5700 。
サール、イアン(1993-02-15)。宇宙ステーションの共通結合機構、マルチボディシミュレーション。航空宇宙計算制御に関する第5回NASA / NSF / DODワークショップの議事録。NASA / JPL。pp。351–364 。
Sievers、Daniel E.&Warden、Harry K.(2010-05-12)。国際宇宙ステーションを動力源とするボルトナットの異常と故障解析の要約。第40回航空宇宙メカニズムシンポジウムの議事録。メカニズム教育協会。177〜186ページ。NASA / CP-2010-216272 。
スミス、ジェームズP。; ハム、ケネスR。; Imtiaz、Kauser S.&Raju、Ivatury S.(2020-01-06)。宇宙飛行評価から学んだ教訓。2020 AIAASciTechフォーラム。AIAA。土井:10.2514 /6.2020-0246。
スミス、マルシアS.(2001-04-04)。NASAの宇宙ステーションプログラム:進化と現状(下院科学委員会での証言) (PDF)。議会調査局。
トラウトマン、パトリックA。; ブリューワー、ローラM。; Heck、Michael L.&Kumar、Renjith R.(1993-01-01)。51.6度の傾斜軌道での宇宙ステーションの自由の組み立てと運用(テクニカルレポート)。NASA / LaRC。NASA-TM-107731 。
アンダーウッド、スティーブ&リボフスキー、オレグ(2007-06-12)。国際宇宙ステーション(ISS)の要素、システム、およびコンポーネントのリークテスト方法の実装。宇宙計画のための環境試験に関する第6回国際シンポジウム。ESA 。
ホイットニー、グレッグ; Melendrez、Davis&Hadlock、Jason(2010-03-01)。ISSとスペースシャトルの「実行」データの調整。NASA Tech Briefs、2010年3月(テクニカルレポート)。NASA / HQ。p。40-41 。
ウィンチ、ジョン&ゴンザレス-ヴァレホ、フアンホセ(1992-08-01)。「国際的な互換性のための停泊メカニズムの設計」。ActaAstronautica。Elsevier Ltd. 28:65–72。Bibcode:1992AcAau..28 … 65W。土井:10.1016 / 0094-5765(92)90010-G 。
Zipay、John J。; バーンスタイン、カレンS; ブルーノ、エリカE。; Deloo、Phillipe&Patin、Raymond(2012-01-01)。世界の最初の軌道の驚異の構造検証-国際宇宙ステーション(ISS)の構造テストと分析。第53回AIAA構造、構造力学および材料会議(プレプリント)。AIAA。JSC-CN-23255 。
ステータスページ
「ISSオンオービットステータス2009年11月20日」。NASA / HQ。2009-11-20 。
「ISSオンオービットステータス01/22/10」。NASA / HQ。2010-01-22 。
「ISSオンオービットステータス2011年1月27日」。NASA / HQ。2011-01-27 。
「ISSデイリーサマリーレポート–08/09/13」。NASA / HQ。2013-08-09 。
「ISSデイリーサマリーレポート–09/29/13」。NASA / HQ。2013-09-29 。
「ISSデイリーサマリーレポート– 2014年4月20日」。NASA / HQ。2014-04-20 。
「ISSデイリーサマリーレポート–01/12/15」。NASA / HQ。2015-01-12 。
「ISSデイリーサマリーレポート–04/17/15」。NASA / HQ。2015-04-17 。
「ISSデイリーサマリーレポート– 2015年8月24日」。NASA / HQ。2015-08-24 。
「ISSデイリーサマリーレポート–12/09/15」。NASA / HQ。2015-12-09 。
「ISSデイリーサマリーレポート– 2016年3月28日」。NASA / HQ。2016-03-26 。
「ISSデイリーサマリーレポート– 2016年4月11日」。NASA / HQ。2016-04-10 。
「ISSデイリーサマリーレポート– 2016年4月18日」。NASA / HQ。2016-04-16 。
「ISSデイリーサマリーレポート– 2016年7月20日」。NASA / HQ。2016-07-20 。
「ISSデイリーサマリーレポート– 2016年10月23日」。NASA / HQ。2016-10-23 。
「ISSデイリーサマリーレポート– 2016年12月13日」。NASA / HQ。2016-12-13 。
「ISSデイリーサマリーレポート– 2017年2月23日」。NASA / HQ。2017-02-23 。
「ISSデイリーサマリーレポート– 2017年3月27日」。NASA / HQ。2017-03-27 。
「ISSデイリーサマリーレポート– 2017年3月30日」。NASA / HQ。2017-03-30 。
「ISSデイリーサマリーレポート– 2017年4月24日」。NASA / HQ。2017-04-22 。
「ISSデイリーサマリーレポート– 2017年6月5日」。NASA / HQ。2017-06-05 。
「ISSデイリーサマリーレポート– 2017年8月16日」。NASA / HQ。2017-08-16 。
「ISSデイリーサマリーレポート– 2017年11月14日」。NASA / HQ。2017-11-14 。
「ISSデイリーサマリーレポート– 2017年12月17日」。NASA / HQ。2017-12-17 。
「ISSデイリーサマリーレポート– 2017年6月12日」。NASA / HQ。2017-06-12 。
「ISSデイリーサマリーレポート– 2018年1月3日」。NASA / HQ。2018-01-03 。
「ISSデイリーサマリーレポート– 2018年4月4日」。NASA / HQ。2018-04-04 。
「ISSデイリーサマリーレポート– 2018年5月24日」。NASA / HQ。2018-05-24 。
「ISSデイリーサマリーレポート– 2018年7月2日」。NASA / HQ。2018-07-02 。
「ISSデイリーサマリーレポート– 2018年9月27日」。NASA / HQ。2018-09-27 。
「ISSデイリーサマリーレポート– 2018年12月8日」。NASA / HQ。2018-12-08 。
「ISSデイリーサマリーレポート– 2019年3月22日」。NASA / HQ。2019-03-09 。
「ISSデイリーサマリーレポート– 2019年4月19日」。NASA / HQ。2019-04-19 。
「ISSデイリーサマリーレポート– 2019年5月6日」。NASA / HQ。2019-05-06 。
「ISSデイリーサマリーレポート– 2019年7月28日」。NASA / HQ。2019-07-28 。
「ISSステータスレポート– 2019年9月28日」。NASA / HQ。2019-09-28 。
「ISSデイリーサマリーレポート– 2019年11月4日」。NASA / HQ。2019-11-04 。
「ISSデイリーサマリーレポート– 2019年12月8日」。NASA / HQ。2019-12-08 。
「ISSデイリーサマリーレポート– 2020年2月18日」。NASA / HQ。2020-02-18 。
「ISSデイリーサマリーレポート– 2020年3月9日」。NASA / HQ。2020-03-09 。
「ISSステータスレポート– 2020年5月25日」。NASA / HQ。2020-05-25 。
「ISSステータスレポート– 2020年10月5日」。NASA / HQ。2020-10-05 。
「ISSステータスレポート– 2020年12月21日」。NASA / HQ。2020-12-21 。
「ISSステータスレポート– 2022年2月22日」。NASA / HQ。2021-02-22 。2021-05-22を取得。
外部リンク
NSTSミッションページ ミッションステータスは、「ニュース」リンクからアクセスできます
ISSオンオービットステータスレポートアーカイブ 2006- 2013年7月
2009年1月から12月までのISSステータスレポートアーカイブ
2010年のISSステータスレポートアーカイブ2010年 1月から12月
2011年1月から2011年8月までのISSステータスレポートアーカイブ
ISSデイリーサマリーレポート 2013年3月-現在
ISSステータスレポート 2014年10月-現在
国立公文書館カタログ CBM、VestibuleなどのすべてのNSTS写真を検索できます。
NASAテクニカルレポートサーバー(NTRS) NASAの組織や担当者が発行するさまざまなテクニカルレポートを検索できます
航空宇宙安全諮問委員会報告 1971-現在
JSC機械システムワーキンググループ
日本の実験モジュール「きぼう」の共通結合機構の受容試験
Expedition 50、EVA#4(2017-03-17)ビデオアーカイブ ノード3のアキシャルACBMへの独自のカバーの取り付けを示す広範な高解像度ビデオ
ノード構造試験記事内部720°ビュー ポート間の支柱のエンドフィッティングを含む、CBMのバース前のたわみに影響を与える構造要素を示しています
も参照してください
コモンズには、共通結合機構に関連するメディアが
宇宙船のドッキングと停泊のメカニズムの比較
![]()
に は、米国航空宇宙局のWebサイトまたはドキュメントからのパブリックドメインの資料が組み込まれています。
「https://en.wikipedia.org/w/index.php?title=Common_Berthing_Mechanism&oldid=1044973107」
から取得”