Servomechanism
は、エンジニアリングです。
は工学の幅広い主題分野に関するものであり、学術書や教科書の参照に加えて大幅な改訂が必要です。 トエンジニアリングは、
「サーボ機構」は会社については、ServomechanismsIncを参照してください で操作する制御サーボ機構時々に短縮、サーボ、エラー検知使用する自動装置である負帰還機構の動作を修正するためには。変位制御アプリケーションでは、通常、出力が目的の効果を達成していることを確認するために、エンコーダまたはその他の位置フィードバックメカニズムが組み込まれています。
この用語は、フィードバックまたはエラー訂正信号が機械的な位置、速度、姿勢、またはその他の測定可能な変数の制御に役立つシステムにのみ正しく適用されます。たとえば、自動車のパワーウィンドウ制御は、位置を制御する自動フィードバックがないため、サーボ機構ではありません。オペレーターはこれを観察によって行います。対照的に、車のクルーズコントロールは、サーボ機構として分類される閉ループフィードバックを使用します。
コンテンツ
1 アプリケーション
1.1 位置制御 1.2 速度制御 1.3 その他
2 サーボモーター
3 歴史
4 公演の種類
5 も参照してください
6 参考文献
7 参考文献
8 外部リンク
アプリケーション編集
位置制御

空気圧アクチュエータと「ポジショナー」を備えたグローブコントロールバルブ。これは、摩擦に関係なくバルブが目的の位置に開くことを保証するサーボです
一般的なタイプのサーボは、位置制御を提供します。一般的に、サーボは電気、油圧、または空気圧です。これらは負帰還の原理で動作し、制御入力は、出力で何らかのタイプのトランスデューサーによって測定された機械システムの実際の位置と比較されます。実際の値と必要な値(「エラー信号」)の差は増幅(および変換)され、エラーを低減または排除するために必要な方向にシステムを駆動するために使用されます。この手順は、制御理論の広く使用されているアプリケーションの1つです。一般的なサーボは、回転(角度)または線形出力を提供できます。
速度制御
ガバナを介した速度制御は、別のタイプのサーボ機構です。蒸気機関は、機械知事を使用しています。別の初期のアプリケーションは、水車の速度を管理することでした。第二次世界大戦の前に、航空機を操縦するためのエンジン速度を制御するために定速プロペラが開発されました。ガスタービンエンジンの燃料制御は、流体力学的または電子的制御のいずれかを採用しています。
その他
ポジショニングサーボ機構は、軍の射撃統制装置および航海装置で最初に使用されました。今日、サーボ機構は、自動工作機械、衛星追跡アンテナ、リモートコントロール飛行機、ボートや飛行機の自動ナビゲーションシステム、および対航空機銃制御システムで使用されています。他の例は、フライ・バイ・ワイヤでシステム、航空機、航空機の制御面を作動させるサーボを使用し、無線制御モデル同じ目的のためにRCサーボを使用します。多くのオートフォーカスカメラは、サーボ機構を使用してレンズを正確に動かします。ハードディスクドライブは、サブミクロンの位置決め精度の磁気サーボシステムを有しています。産業機械では、多くのアプリケーションでサーボを使用して複雑なモーションを実行します。
サーボモーター
サーボモーターと
サーボ(ラジコン)

産業用
サーボモーター
灰色/緑色のシリンダーは
ブラシタイプの
DCモーターです。下部の黒い部分には
遊星
減速機があり、モーター上部の黒い物体は位置フィードバック用の光学
式ロータリーエンコーダーです。
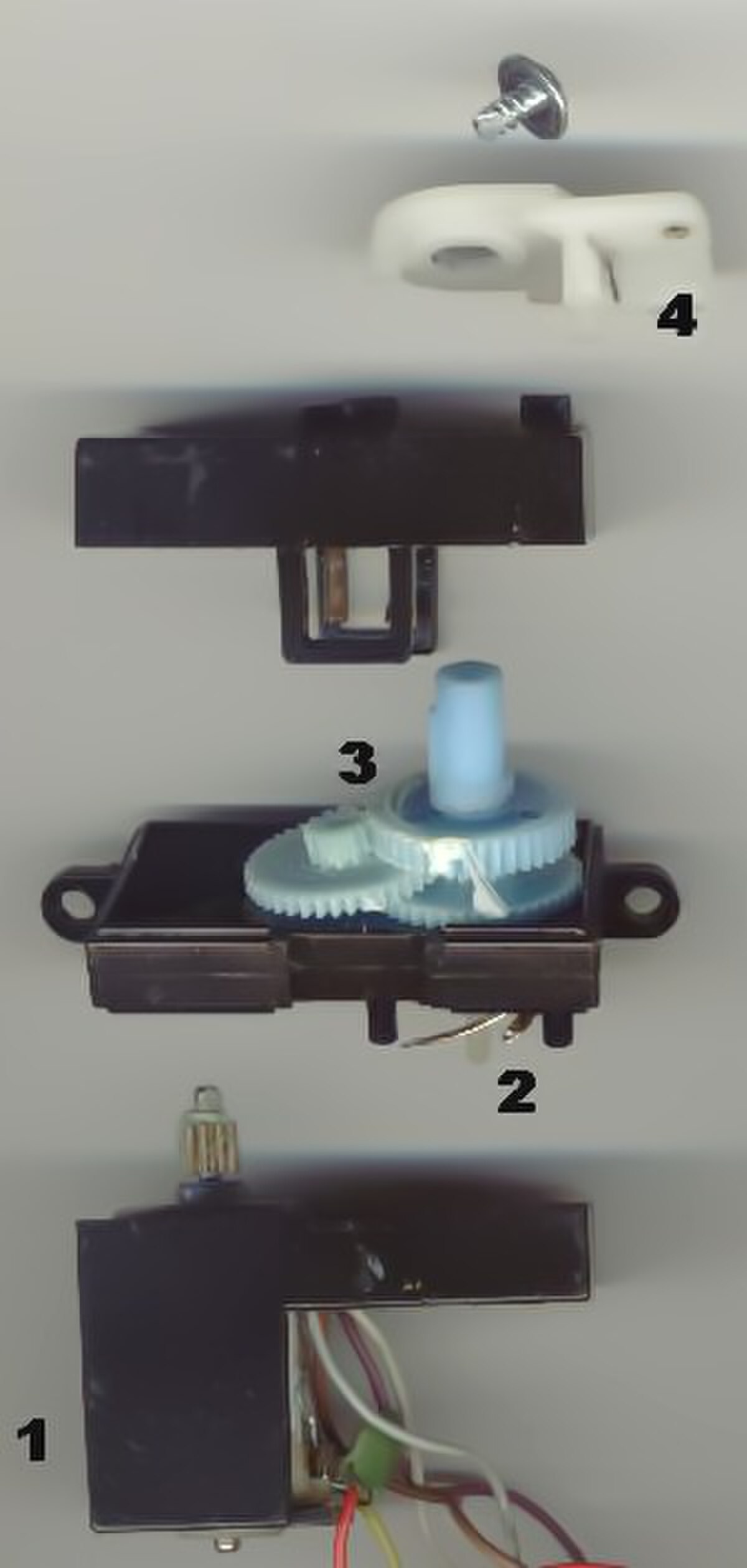
小型R / Cサーボ機構。 1. 電気モーター
2.位置フィードバック
ポテンショメーター
3.減速機 .
アクチュエーターアーム
サーボモータと組み合わされるモータの特定のタイプであるロータリエンコーダやポテンショメータサーボ機構を形成します。このアセンブリは、別のサーボ機構の一部を形成する場合がポテンショメータは位置を示す単純なアナログ信号を提供し、エンコーダは位置と通常は速度フィードバックを提供します。これにより、PIDコントローラを使用して位置をより正確に制御できるため、(特定のモーター出力に対して)安定した位置をより速く達成できます。 。ポテンショメータは温度が変化するとドリフトする可能性がありますが、エンコーダはより安定していて正確です。
サーボモーターは、ハイエンドとローエンドの両方のアプリケーションに使用されます。ハイエンドには、ロータリーエンコーダーを使用する精密産業用コンポーネントがローエンドには、フリーランニングモーターとコントローラーが組み込まれたシンプルなポテンショメーター位置センサーを使用するラジコンモデルで使用される安価なラジコンサーボ(RCサーボ)がサーボモーターという用語は一般にハイエンドの産業用コンポーネントを指しますが、サーボという用語はポテンショメータを使用する安価なデバイスを表すために最もよく使用されます。ステッピングモーターは、より大きなサーボ機構を構築するためにも使用されますが、サーボモーターとは見なされません。ステッピングモーターは、その構造上、固有の角度位置決めがあり、これは通常、フィードバックなしで開ループ方式で使用されます。これらは通常、中精度のアプリケーションに使用されます。
RCサーボは、車のステアリング、飛行機の操縦翼面、ボートの舵など、さまざまな機械システムの作動を提供するために使用されます。それらの手頃な価格、信頼性、およびマイクロプロセッサによる制御の単純さのために、それらは小規模のロボット工学アプリケーションでしばしば使用されます。標準のRCレシーバー(またはマイクロコントローラー)は、パルス幅変調(PWM)信号をサーボに送信します。サーボ内の電子機器は、パルスの幅をある位置に変換します。サーボが回転するように命令されると、ポテンショメータが命令された位置に対応する値に達するまでモーターに電力が供給されます。
歴史

パワーアシスト船のステアリングシステムは、舵が目的の位置に移動することを保証するサーボ機構の初期のユーザーでした。
ジェームズワットの蒸気機関 ガバナーは、一般的に最初の動力フィードバックシステムと見なされています。風車の扇形は、自動制御の以前の例であり、それは持っていないので、増幅器または利得を、それが通常サーボ機構とは見なされません。
最初のフィードバック位置制御装置は、船の車輪の位置に基づいて大型船の舵を配置するために使用される船のステアリングエンジンでした。ジョン・マクファーレン・グレイは先駆者でした。彼の特許を取得したデザインは、上で使用されたグレート・イースタン1866年にジョゼフ・ファーコット1862と1868年の間にいくつかの特許で、フィードバックのコンセプトのための同等の信用に値するかもしれ
テレモーターは、1872年頃にアンドリューベッツブラウンによって発明され、制御室とエンジンの間の精巧なメカニズムを大幅に簡素化することができました。蒸気ステアリングエンジンは、入力、出力、エラー信号、および負のフィードバックに使用されるエラー信号を増幅してエラーをゼロに近づける手段という、最新のサーボ機構の特性を備えていました。Ragonnetパワーリバースメカニズムは、1909年に特許を取得した線形運動用の汎用空気または蒸気駆動サーボアンプでした。
電気サーボ機構は、早くも1888年にエリシャグレイのテレオートグラフで使用されました。
電気サーボ機構にはパワーアンプが必要です。第二次世界大戦では、パワーアンプとしてアンプリダインを使用した電気射撃統制サーボ機構が開発されました。UNIVAC IコンピューターのUNISERVOテープドライブには、真空管増幅器が使用されていました。イギリス海軍は、1928年にHMSチャンピオンでリモートパワーコントロール(RPC)の実験を開始し、1930年代初頭にサーチライトを制御するためにRPCを使用し始めました。第二次世界大戦中、RPCは銃架と銃のディレクターを制御するために使用されました。
最新のサーボ機構は、通常MOSFETまたはサイリスタデバイスから構築されたソリッドステートパワーアンプを使用します。小さなサーボはパワートランジスタを使用する場合が
言葉の起源は、フランスの「から来ていると考えられるルServomoteur最初の船の操縦で使用するための油圧や蒸気エンジンを記述するために1868年にJJL Farcotによって使用される」またはslavemotor、。
最も単純な種類のサーボは、バンバン制御を使用します。より複雑な制御システムは、比例制御、PID制御、および状態空間制御を使用します。これらは、現代の制御理論で研究されています。
公演の種類
サーボは、フィードバック制御システムによって分類できます。
タイプ0サーボ:定常状態では、一定のエラー信号で一定値の出力を生成します。
タイプ1サーボ:定常状態では、ヌルエラー信号で出力の一定値を生成しますが、リファレンスの一定の変化率は、リファレンスの追跡における一定のエラーを意味します。
タイプ2サーボ:定常状態では、ヌルエラー信号で一定値の出力を生成します。参照の一定の変化率は、参照の追跡におけるヌルエラーを意味します。参照の一定の加速率は、参照の追跡における一定のエラーを意味します。
サーボ帯域幅は、指令入力の急激な変化を追跡するためのサーボの能力を示します。
も参照してください
フラクショナル馬力モーター
運動制御
サーボ制御
シンクロ、サーボ機構で使用される送信機と受信機のモーターの形式
参考文献
ベネット、S。(1993)。制御工学の歴史1930年から1955年。ロンドン:Peter PeregrinusLtd。電気工学会を代表して。ISBN 0-86341-280-7。
Hsue-Shen Tsien(1954)エンジニアリングサイバネティックス、McGraw Hill、HathiTrustからのリンク
参考文献
^ Baldor Electric Company –サーボ制御の事実。2013年9月25日にアクセス ^ Anaheim Automation:サーボモーターガイド。2013年9月25日にアクセス ^ BusinessDictionary.comの定義。2013年9月25日にアクセス ^ ベネット、スチュアート(1986-01-01)。制御工学の歴史、1800年から1930年。IET。pp。98–100。ISBN 978-0-86341-047-5。
^ アンドリュー・ベッツ・ブラウン ^ Eugine L. Ragonnet、機関車の制御メカニズム、米国特許930,225、1909年8月9日。
^ IEEE Industry Applications Magazine 1996年3月/ 4月、74ページ ^ GW Younkin、産業用サーボ制御システム–基本とアプリケーション–第2版、テイラーアンドフランシス、2007年。
外部リンク
コモンズには、サーボに関連するメディアが
オンタリオニュース「サーボ技術のパイオニア」
「サーボループ」のRaneProオーディオリファレンスの定義
Seattle Robotics Societyの「サーボとは」
さまざまな種類のサーボモーター」”